試行錯誤の記録– category –
-

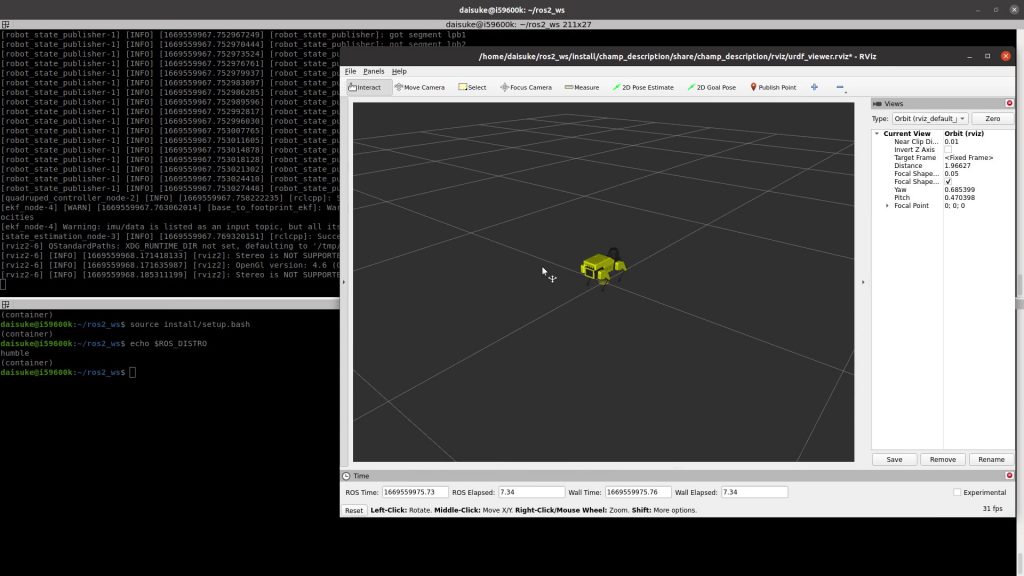
TurtleBot3 + Gazebo + Navigation2 (ROS 2 Jazzy)
ROS 2 JazzyでGazebo(旧Ignition)上のTurtleBot3をNavigation2(Nav2)を動かすまで+その過程で調べたことのメモです。 背景 ROS 2 HumbleまではROBOTIS公式のe-manualを参照すればよかったのですが、現状はJazzyのサポートがないためその他のリソース... -
Ubuntuで一時的に容量の小さい仮想ストレージを作成する方法
ディスク容量がいっぱいになったときのソフトウェアの挙動を確認したい場合などに、一時的に容量の小さい仮想ストレージを作成する方法のメモです。調べた際にちょうどいい方法がうまくヒットしなかったのでメモします。 ログを書き出すツールを作成する際... -
CHAMPをROS 2 Humbleへアップグレードした際にやったこと
4脚ロボット制御用のROSパッケージであるCHAMPを、ROS 2 Humbleに対応させるためにPull Requestを作成しました。その際に遭遇した内容については、その他のROS 2パッケージにおいてもROS 2 GalacticからROS 2 Humbleに移行する際に影響する可能性がありそ... -
osrf/rockerを使ってPC内に複数のROS distroの開発環境を整える方法
Dockerを使ってGUIアプリケーションを起動するには、起動にちょっと工夫が必要だったり一筋縄では行かないことが多いです。osrf/rockerというツールを使うと一筋縄では行かない部分を少しだけ簡単にできるので、その使い方を紹介します。 今回紹介する方法... -
Mini Pupperを動かすまで(組み立て編)
KickstarterでbackしていたMini Pupper(#minipupper / #ミニぷぱ)が届き始めているようです。私のところにも届いたので組み立てました。その過程をメモします。今回は組み立て編です。 概要 Mini PupperはStanford Pupperの派生プロジェクトで中国のMang... -
Mini Pupperを動かすまで(ソフトウェア準備編)
前回はMini Pupperを組み立てました。今回は起動してジョイスティック操作するまでをメモします。 https://memoteki.net/archives/4673 組み立て方および動かし方は、基本的には以下のRead the Docsに公開されているドキュメントの通りです。MangDang社が... -
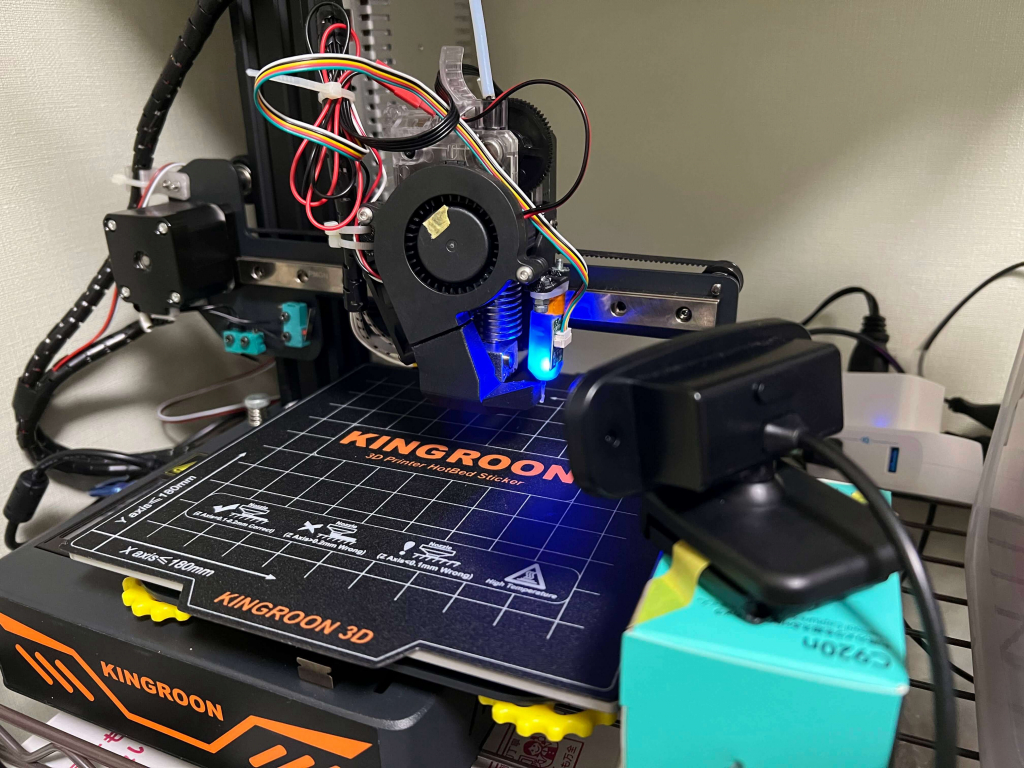
[2022年2月版] 3DプリンタKINGROON KP3Sのファームウェア書き換え
格安なのに結構しっかりとしていると話題の3Dプリンタ、KINGROONのKP3Sを改造してオートレベリング対応するため、BLTouch(のクローンである3DTouch)に対応させるべくファームウェアを更新したのでその方法をメモしておきます。 moyashi (@hitoriblog)さ... -
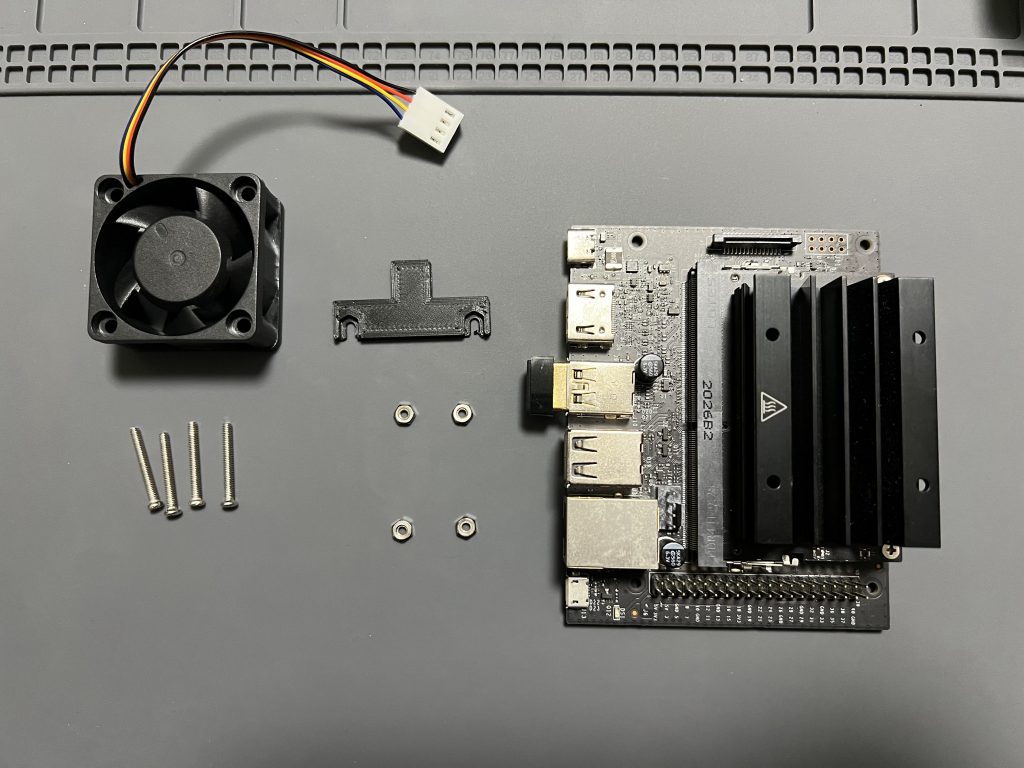
Jetson Nanoにファンを取り付けたらよかったという話
Jetson Nano Develper Kitにファンを取り付けたらよかったので共有します。ファン取り付けの際にナットを保持するのが大変だったので治具を作ってみました。 ファンを取り付ける効果 ファンを取り付けるとパッシブな空冷ではなく強制空冷になり、ヒートシ... -
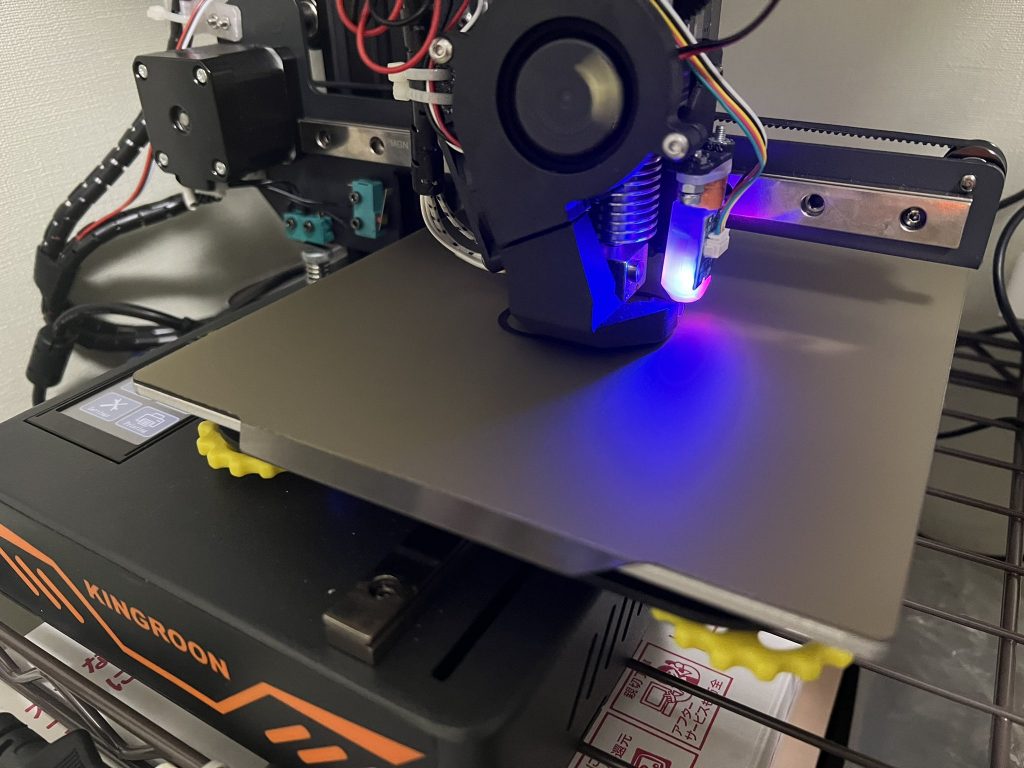
3DプリンタKINGROON KP3Sを購入しました
2021年9月末に新しい3Dプリンタを購入しました。KINGROONのKP3Sという機種です。 ファームウェア入れ替えたり色々改造しようと考えているため、3Dプリンタ自体の紹介もしておこうかなと思います。 経緯 3DプリンタとしてはAfinia H800+をすでに所持してお... -
メモリ2GB版Jetson NanoでDocker内のROSを使うまで
Jetson Nano 2GB Developer Kit(メモリ2GB版Jetson Nano)でROSインストール済みのDockerイメージを用意して、コンテナ内のROSを使うまでをメモします。 この記事はROS/ROS2 Advent Calendar 2020の16日目の記事です。 概要 Jetson Nano 2GB Developer Ki... -
Amazon Lightsailでros-desktop-vncを起動する方法
2020年11月13日にAmazonが公開したブログでLightsail Containersの紹介がありました。 これを使ってtiryoh/ros-desktop-vncを起動してみたので紹介します。 https://aws.amazon.com/jp/blogs/aws/lightsail-containers-an-easy-way-to-run-your-containers... -
turtlesimを全方向移動に対応させるPRをマージしてもらった話
ROSのチュートリアルでよく使われるシミュレータにturtlesimがあります。このturtlesimをholonomic motion、つまり、オムニホイールやメカナムホイールを搭載したロボットのように全方向移動できるようにするためのPull Request(PR)を出して、無事にマー... -
PlatformIOでM5Stack ATOMに書き込むまで
Windows上のVisual Studio CodeでPlatformIOでM5Stack ATOM MatrixのLチカ用プロジェクトを作成し、プログラムを書き込んでみたのでその方法をメモしておきます。 PlatformIOはPython製のマイコン開発環境です。公式サイトでは A new generation ecosystem... -
ROS2でコンピュータ同士が通信できない場合の対処方法
ROS2ではノード間の通信にDDS(Data Distribution Service)を使用しています((DDSについては@youtalkさんの記事が詳しいです。DDS (Data Distribution Service) とは | ros.youtalk.jphttps://ros.youtalk.jp/2017/05/28/dds.html))。コンピュータ同士(... -
Parallels Tools 14.1.3をLinux Kernel 5.0にインストールする方法
ROS2ではじめよう 次世代ロボットプログラミングの先行販売分を運良く入手できたので、手元のMacBookのParallels DesktopにXubuntu BionicをインストールしてROS2を試しています。 Parallels Desktop 14(バージョン 14.1.3 (45485))でインストールできる...






12