KickstarterでbackしていたMini Pupper(#minipupper / #ミニぷぱ)が届き始めているようです。私のところにも届いたので組み立てました。その過程をメモします。今回は組み立て編です。
概要
Mini PupperはStanford Pupperの派生プロジェクトで中国のMangDang社が中心となって開発したプロジェクト・四脚ロボットロボット両方のことを指すようです。詳しくは書かれていませんが、Stanford Pupperの開発者も少し関わったようです。
In June 2021 MangDang released Mini Pupper, a commercial educational quadruped robot inspired by Stanford Pupper and in light collaboration with Nathan Kau, the original creator of Stanford Pupper.
https://stanfordstudentrobotics.org/pupper
歩くとこんな感じ。絶賛ドキュメント整備中ということらしくて、サーボのオフセットはいま雰囲気で調整してます。ちゃんと調整できたらもうちょい安定しそう。#MiniPupper #ミニぷぱ pic.twitter.com/UHJUSfOEqz
— たいりょーくん (@Tiryoh) December 24, 2021
2022年1月4日になってKickstarterでbackしていた分が届きました。今回はこのKickstarterでbackしていた分の組み立てについてメモします。
Kickstarterでbackしてた分の #MiniPupper 届いた! pic.twitter.com/ZWZ1Wdb1sm
— たいりょーくん (@Tiryoh) January 24, 2022
Mini Pupperプロジェクトとの関係性について
私は2021年11月頃にMangDang社がKickstarterのプロジェクトページに書いていたアップデート情報を見て、私から連絡をとりました。2021年12月頃から世界中のbackerに先立って色々フィードバックしていました(他にも似たようなユーザがいたのかどうかは把握していません)。本記事はMangDang社からPR依頼を受けたものではありません。念のため。
If you are located in Japan, and can help us to give your feedback during 11th~15th Dec, please send us a mail to ***@****
Happy Thanksgiving! Production Progress Update – 25 November 2022
https://www.kickstarter.com/projects/336477435/mini-pupper-open-sourceros-robot-dog-kit/posts/3370301
※メールアドレスは引用時に省略しました
おそらく2021年12月末のアップデート情報に書かれている「Daisuke located in Japan」というのは私のことです笑
(実際ネジが10本以上足りなかったり、3Dプリントパーツが足りなかったりなどありました。)
色々フィードバックをしており、例えば電源ぶち切りではなくてゲームパッドのコントローラからシャットダウンするようになったのもその成果の1つです。
There are some change points between our Kickstarter design and now design for the new features. At first we had not enough new boards, some volunteers got our Kickstarter design, but they showed their patience, passion, and giving us their professional advice.
For an example, we missed some components in the package to Daisuke located in Japan for our mistake.
But Daisuke still can run his kit using his own parts and giving us some professional advice.
We are so lucky, and thanks a lot for all the guys who are helping us.
Production Progress Update – 22 Dec. 2021
https://www.kickstarter.com/projects/336477435/mini-pupper-open-sourceros-robot-dog-kit/posts/3391446
ROS入れて動かしてSLAMとナビゲーションができることまで確認しています(開発メモ)。
ROSで動かして地図作るところまでできた! #MiniPupper #ミニぷぱ pic.twitter.com/zhdR2BaWIh
— たいりょーくん (@Tiryoh) January 3, 2022
組み立て
組み立て方は基本的には以下のRead the Docsに公開されているドキュメントの通りです(MangDang社が公式にメンテナンスしています)。
日本語と英語それぞれメンテナンスすることになったようです。
【公式マニュアル更新のお知らせ】
— Mini Pupper|『ミニぷぱ』ロボット犬🤖Amazonにて販売中! (@MangDang_Japan) August 30, 2022
皆様いつもご応援ありがとうございます。
マニュアルを更新しましたので、お知らせいたします!
▶️ミニぷぱ ユーザーマニュアル:https://t.co/YI0mm1zg4B
今後随時コンテンツ追加いたしますので、何か改善してほしい点や機能があったら、ぜひ教えてくださいね😆 pic.twitter.com/4xi3jFtzzw
@nisshan_さんのQiitaの記事も参考になると思います。

追加で準備したもの
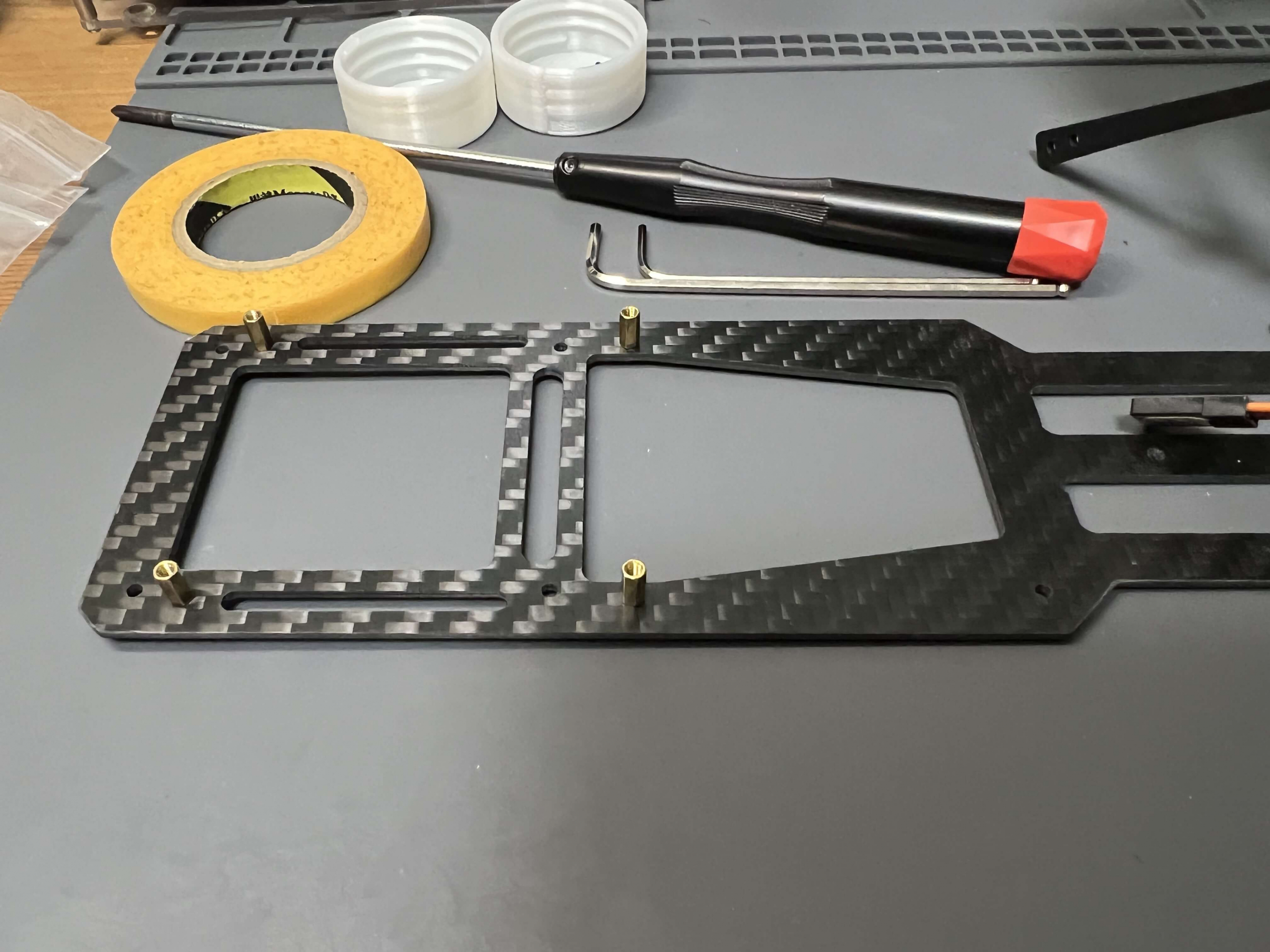
いくつか追加で用意したものがあります。
- 小物入れ(ネジやナットを入れておくのに使います)
- プラスドライバ(0番)
- 六角レンチ(1.5mmと2.0mm)
- ネジロック剤(LOCTITE 243)
- ピンセット(先が細いもの)
- マスキングテープ
- 油性ペン

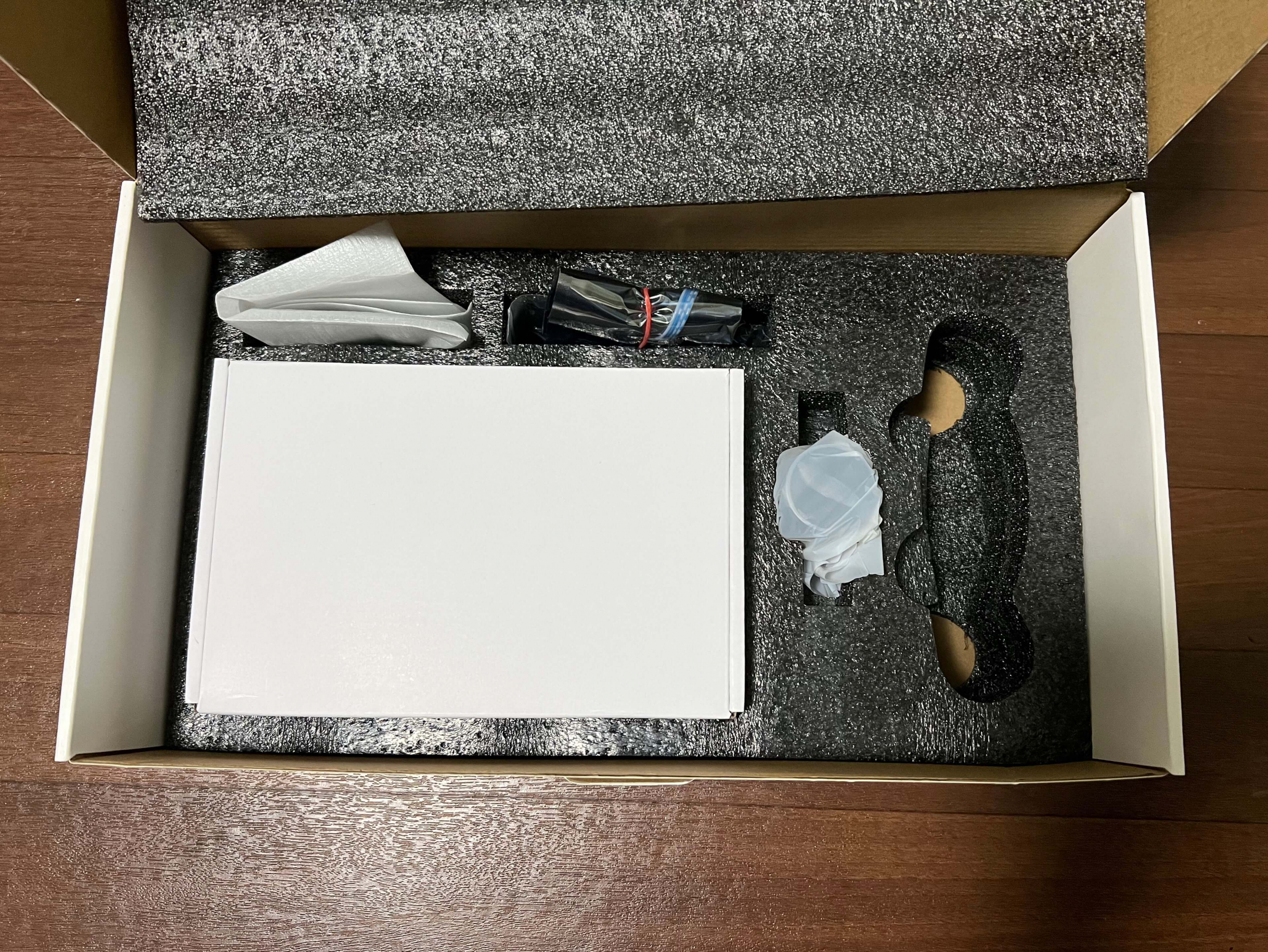
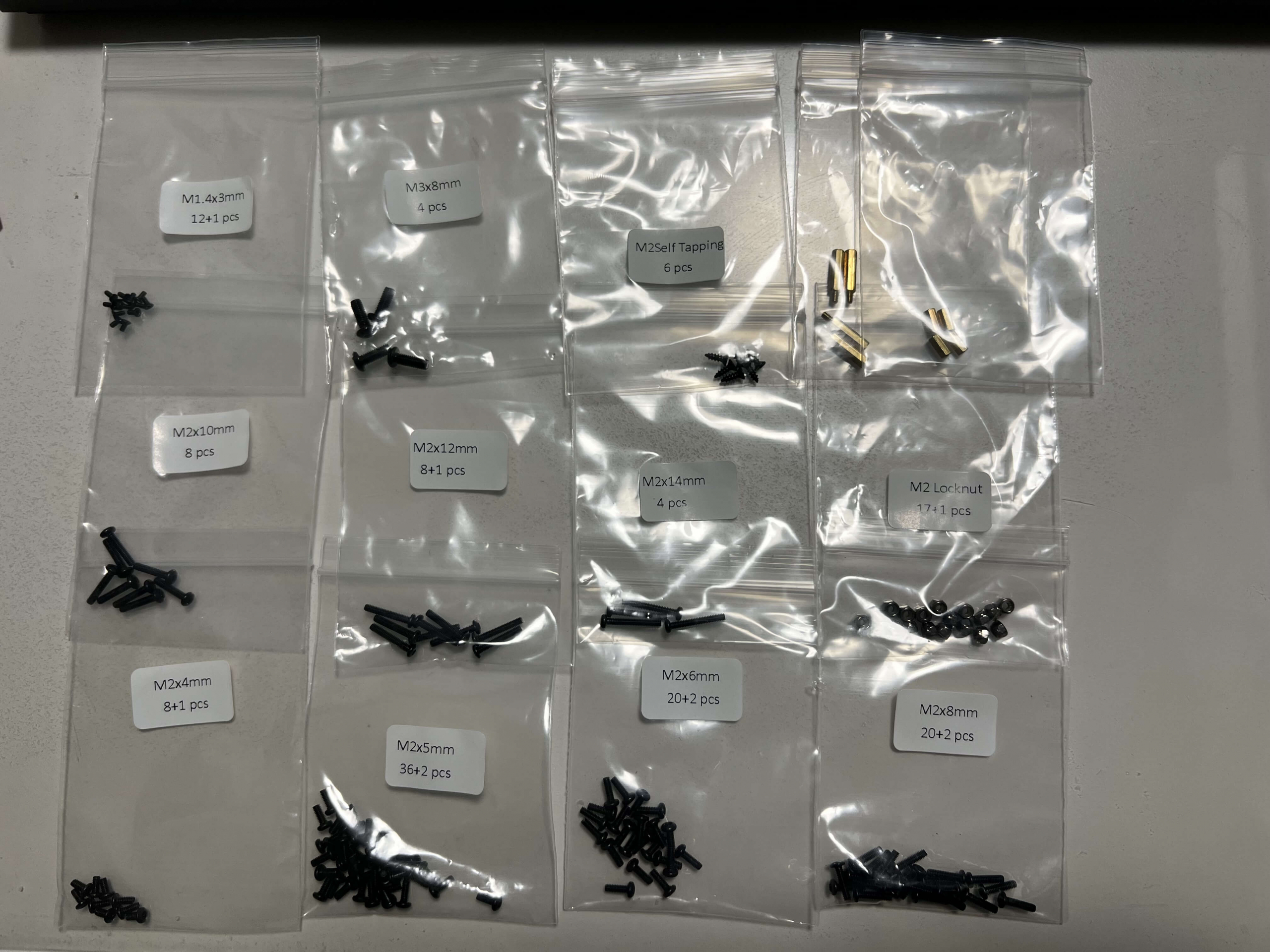
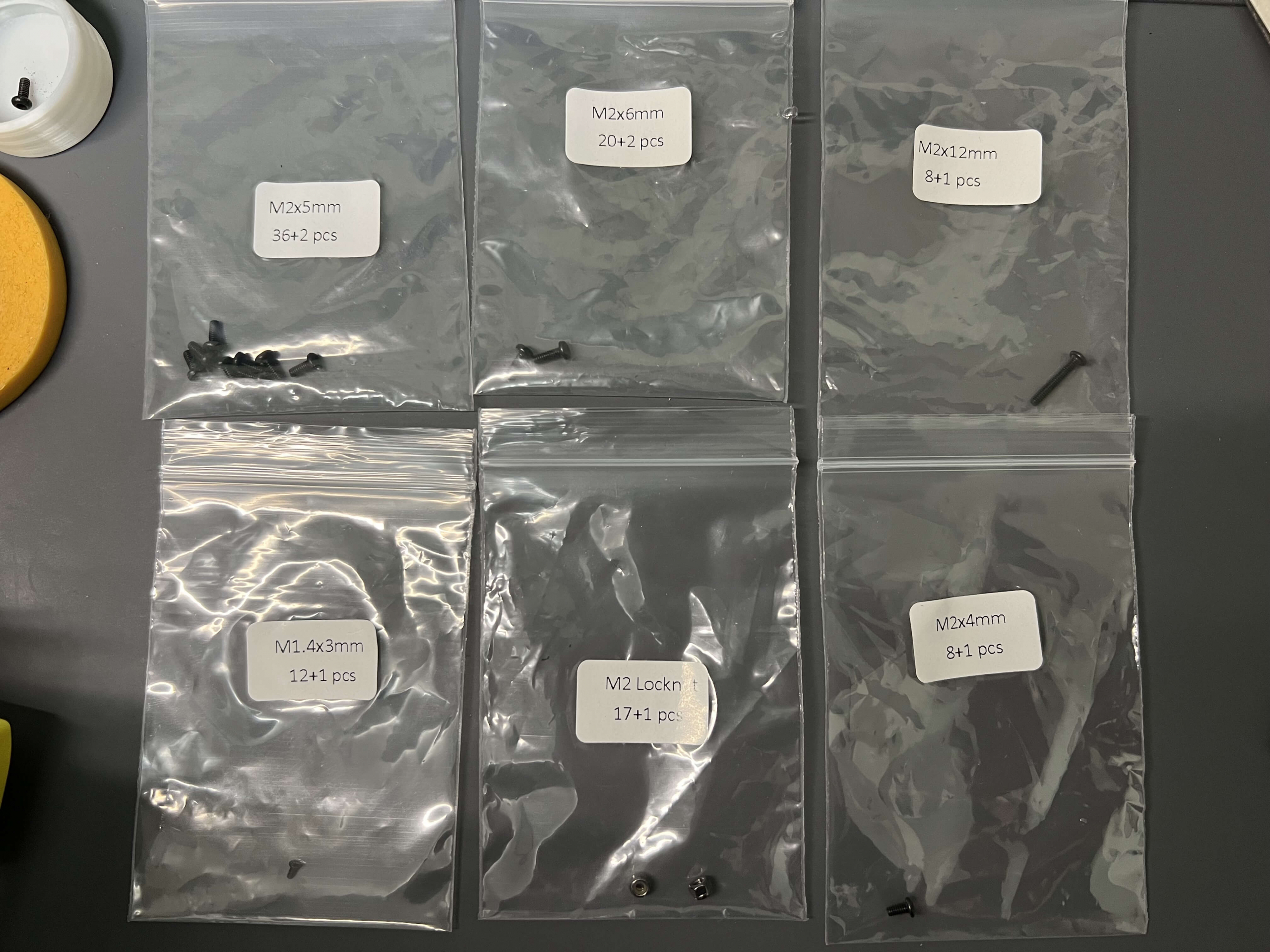
外箱と内容物




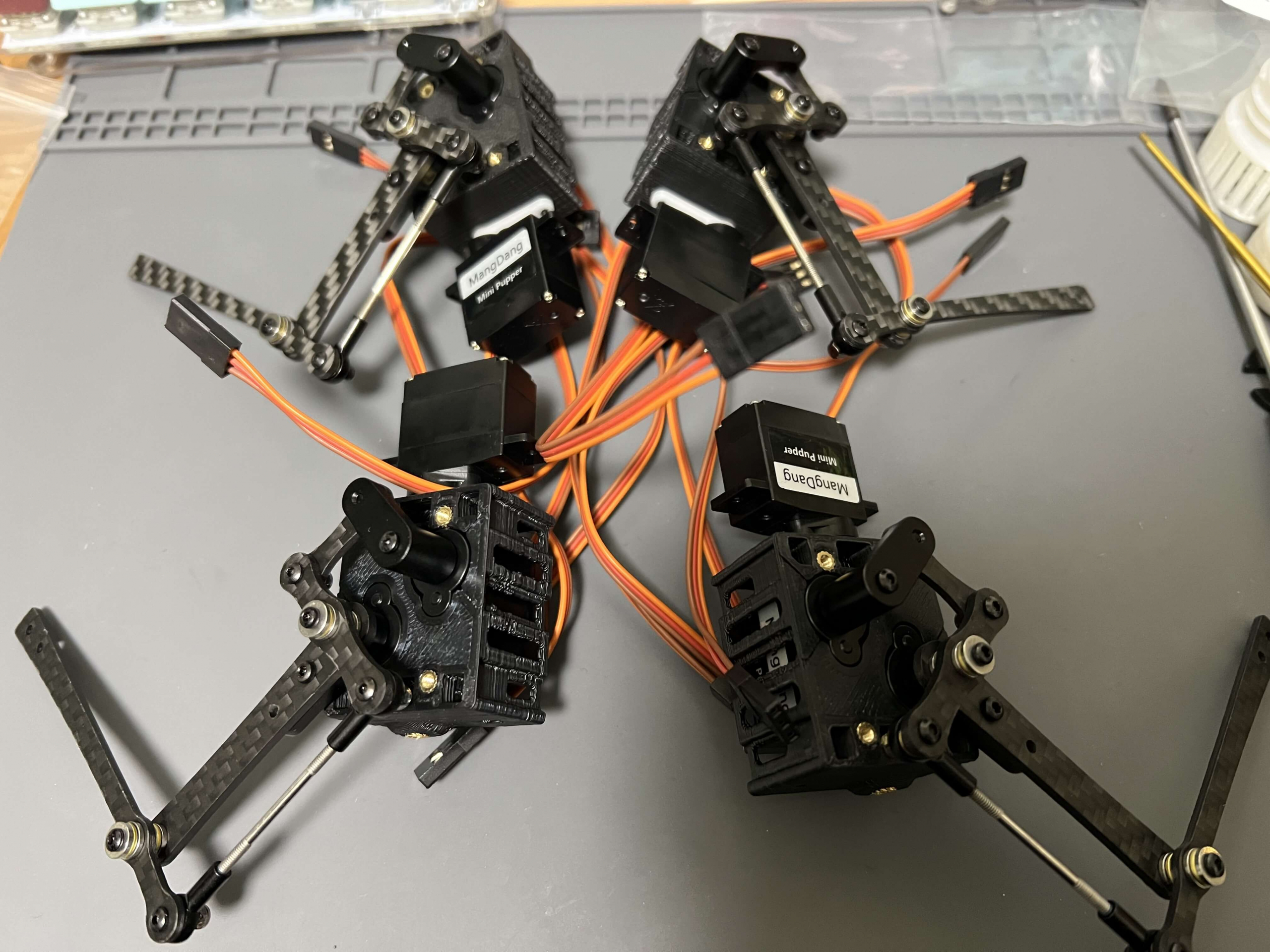
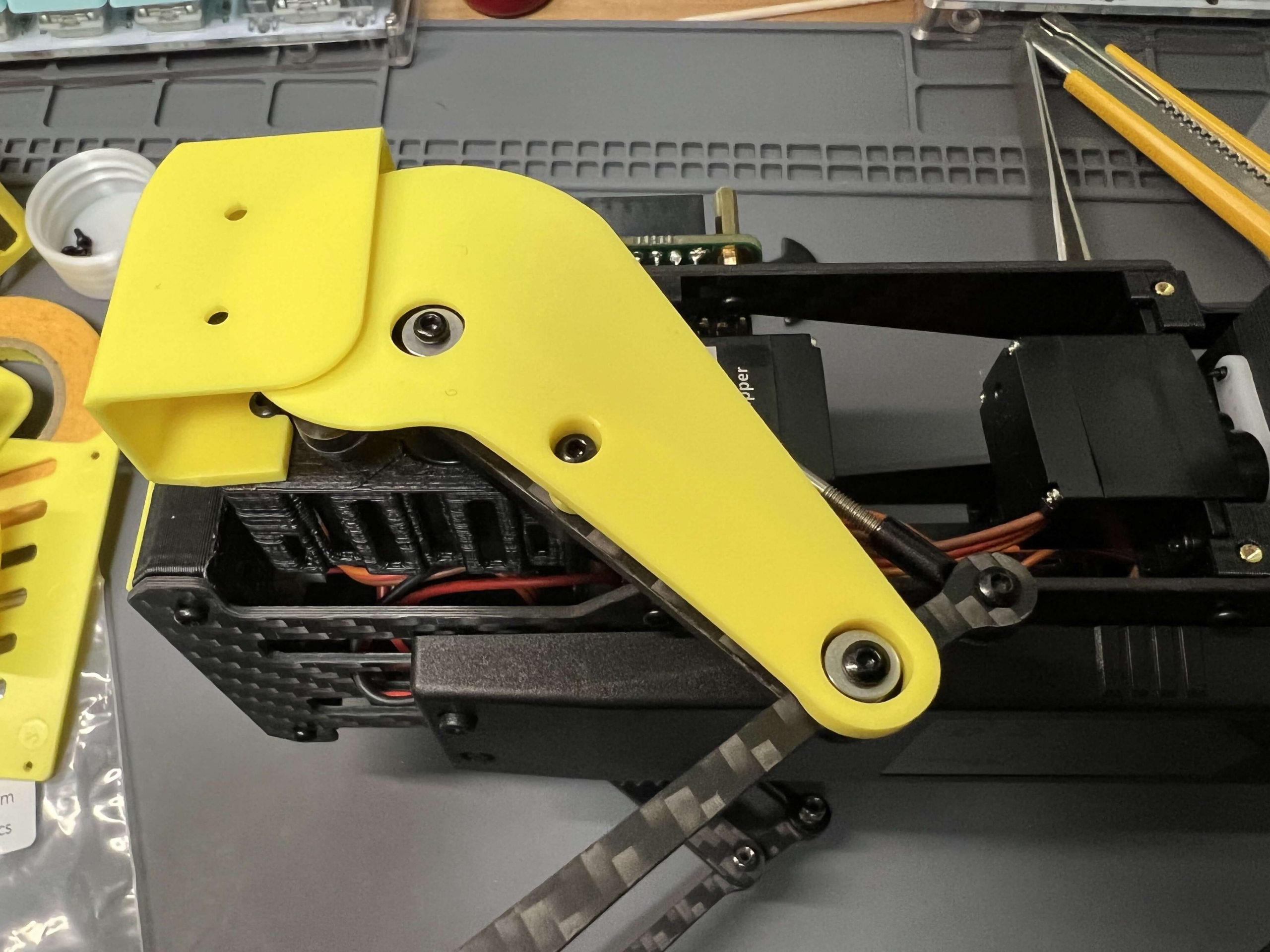
脚部の組み立て
脚部の組み立てを進めます。組み立てではここが一番大変だと思います。
脚部の足先に近い側から適宜ネジロック剤を塗布しながら組み立てます。前後左右を間違えると組み立て直しになってしまうので3Dデータを見ながら確認してもよいかもしれません。



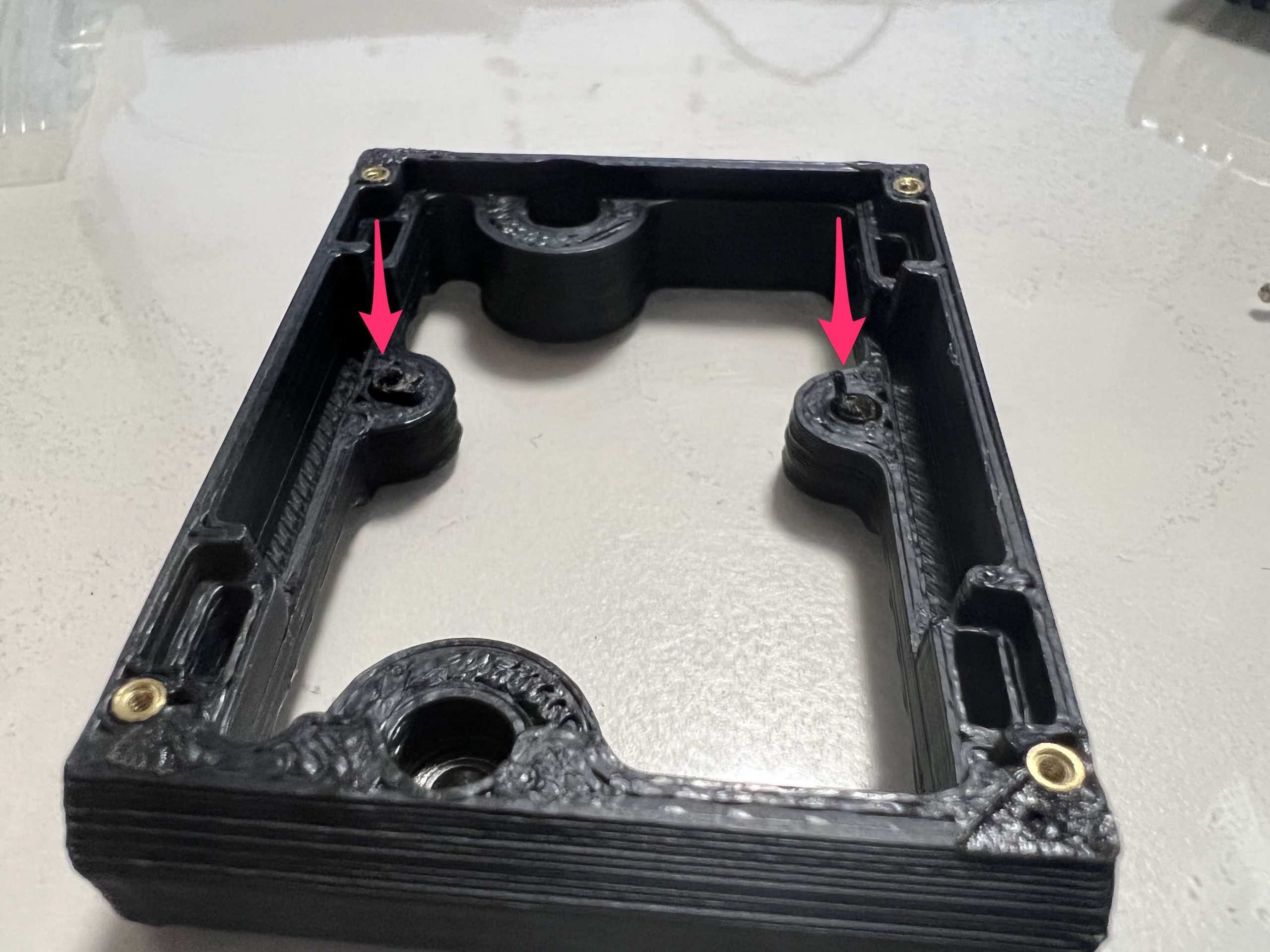
サーボモータも組み込みますがここで3Dプリントパーツの一部に修正が必要でした。
バリが出ていたり、インサートナットが浮いていたりしてサーボモータが奥まではまっていないと先に進めません。余談ですが、先行レビュー用の機体を組み立てるときはインサートナットも全部自分で熱圧入したのでバリやインサートナットの圧入周りではトラブルはありませんでした。
バリについては小さければピンセットでとれるでしょうし、とれない場合はカッター等で削ります。インサートナットについてはハンダごてで温め直して修正します。


3Dプリント部品を整えたら組み立てていきます。




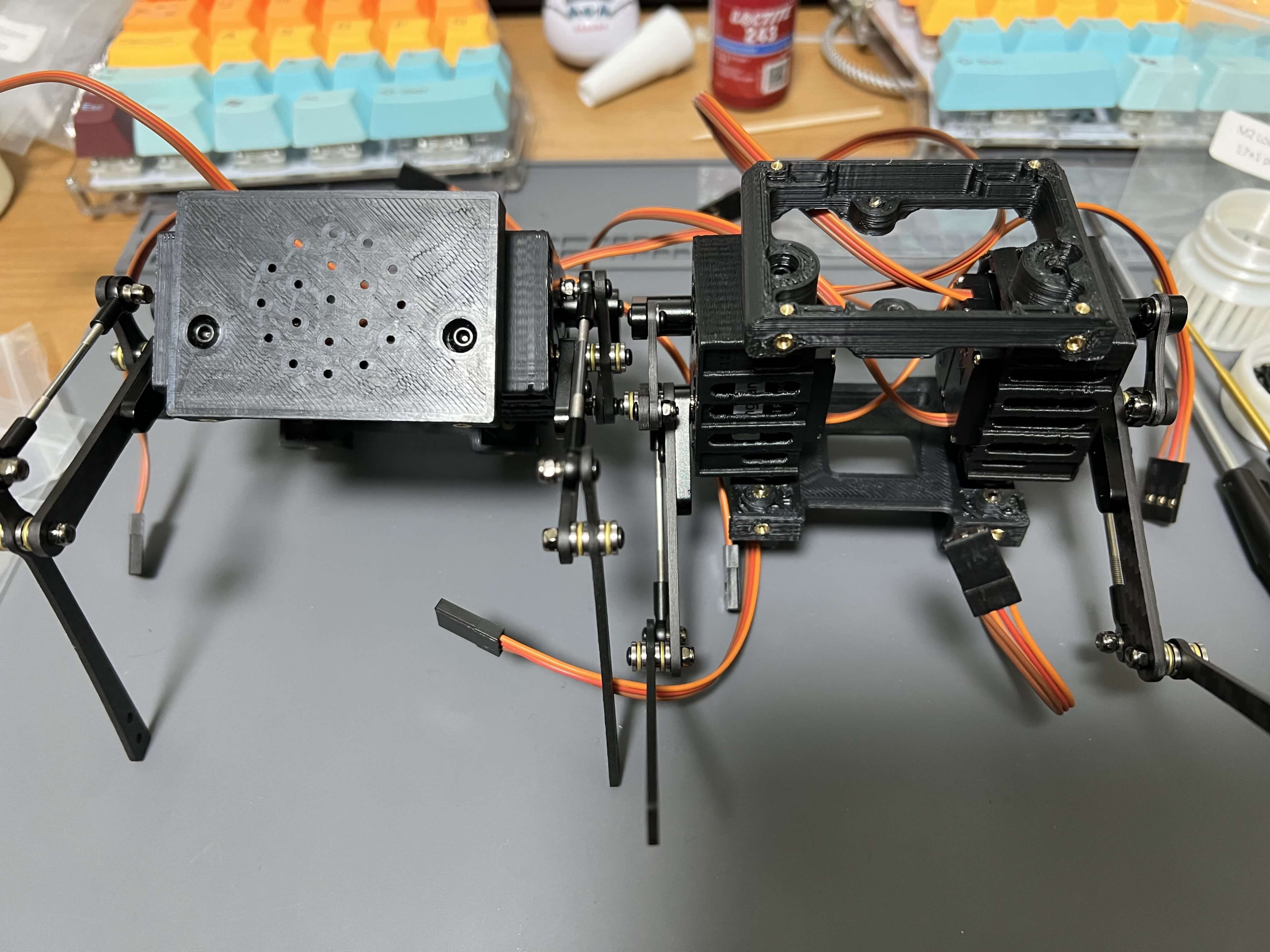
本体の組み立て
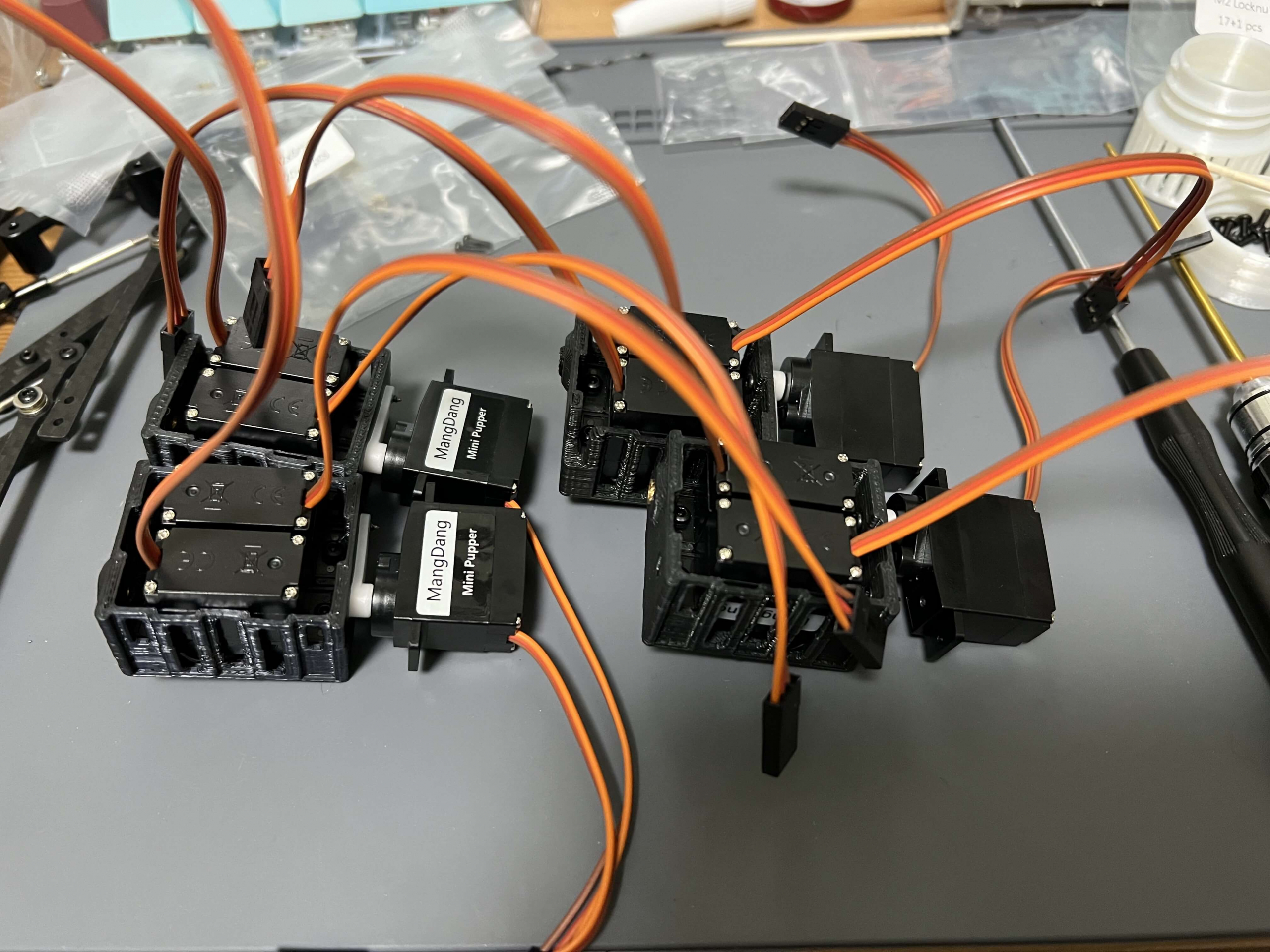
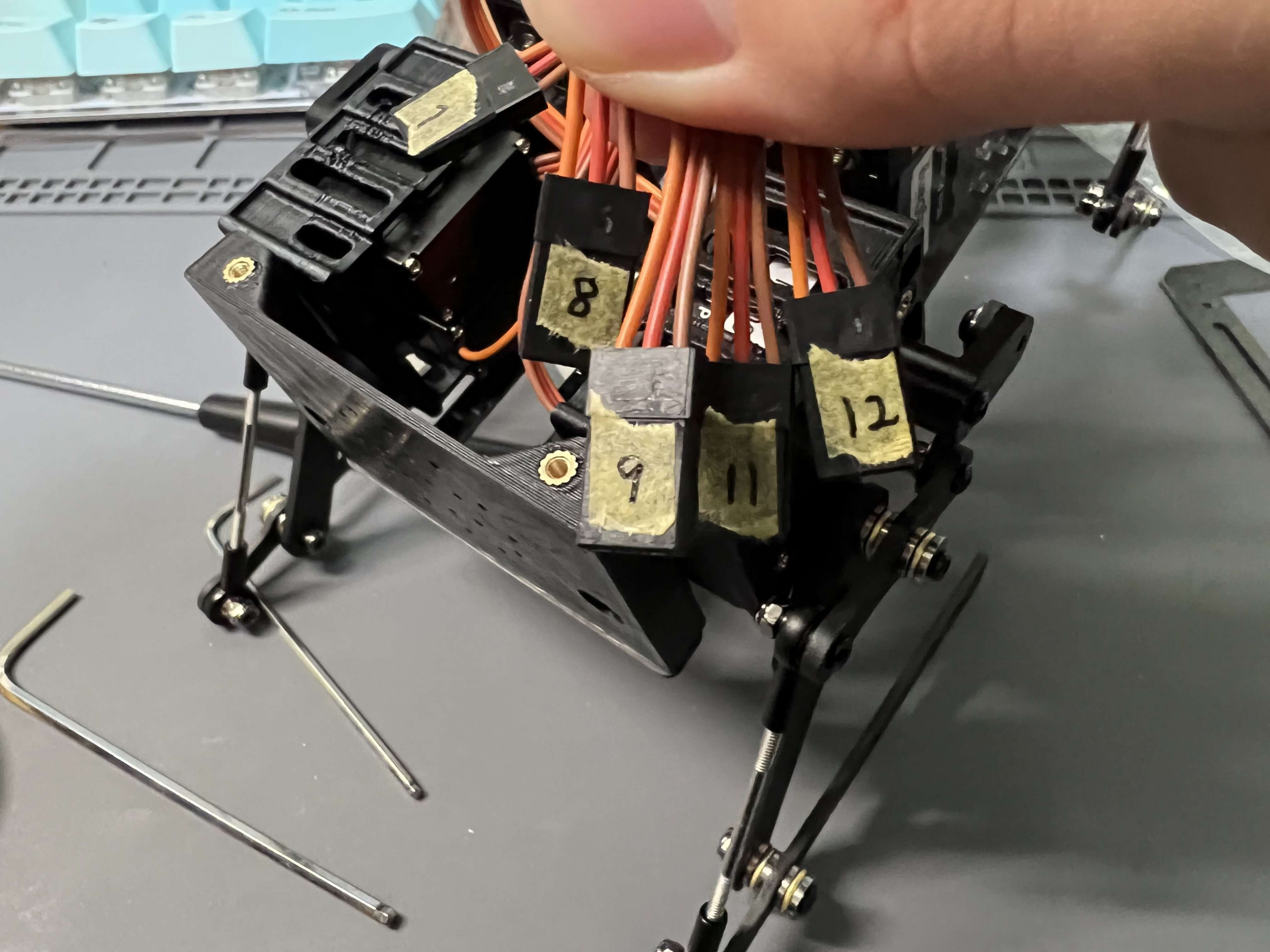
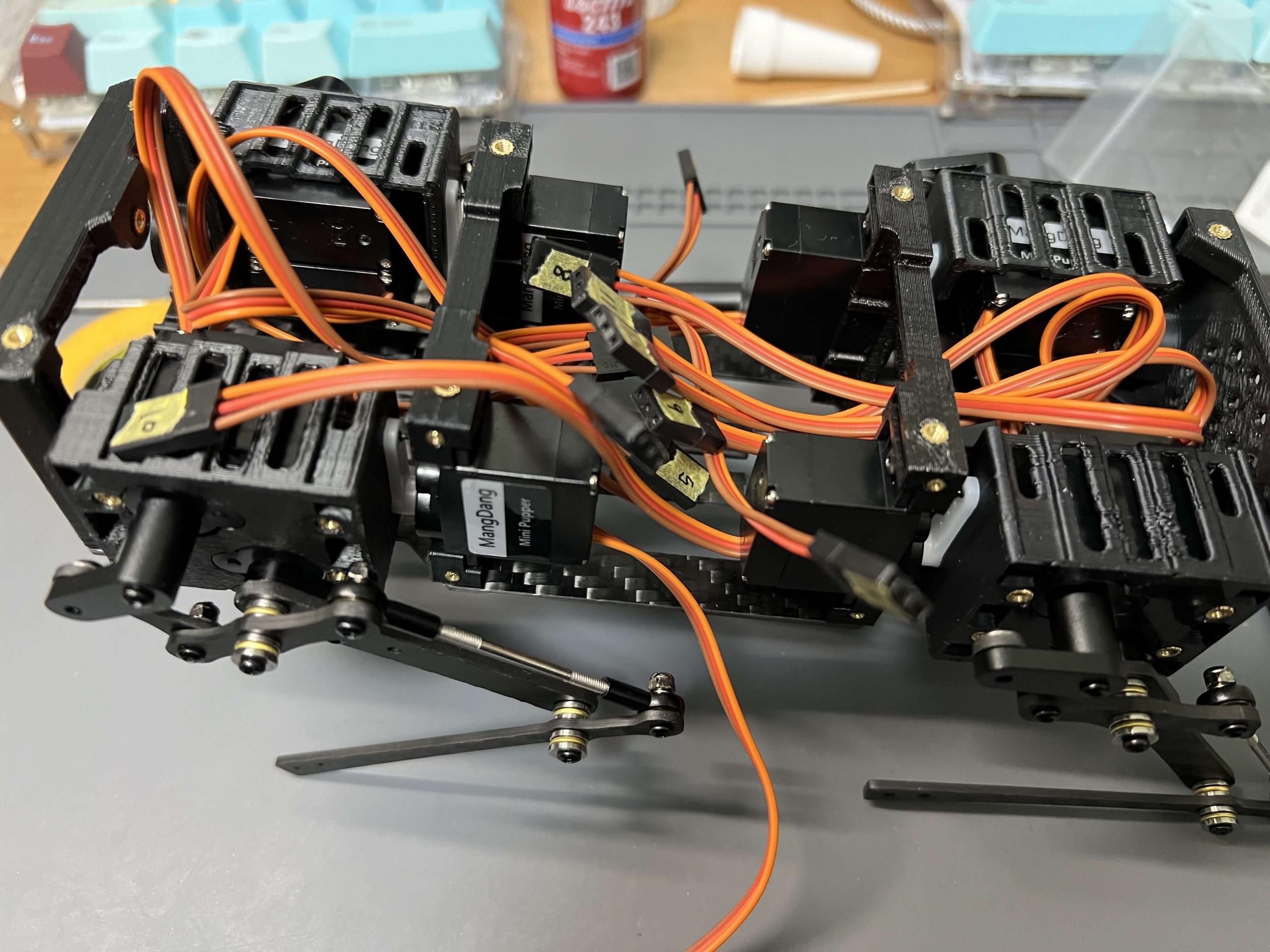
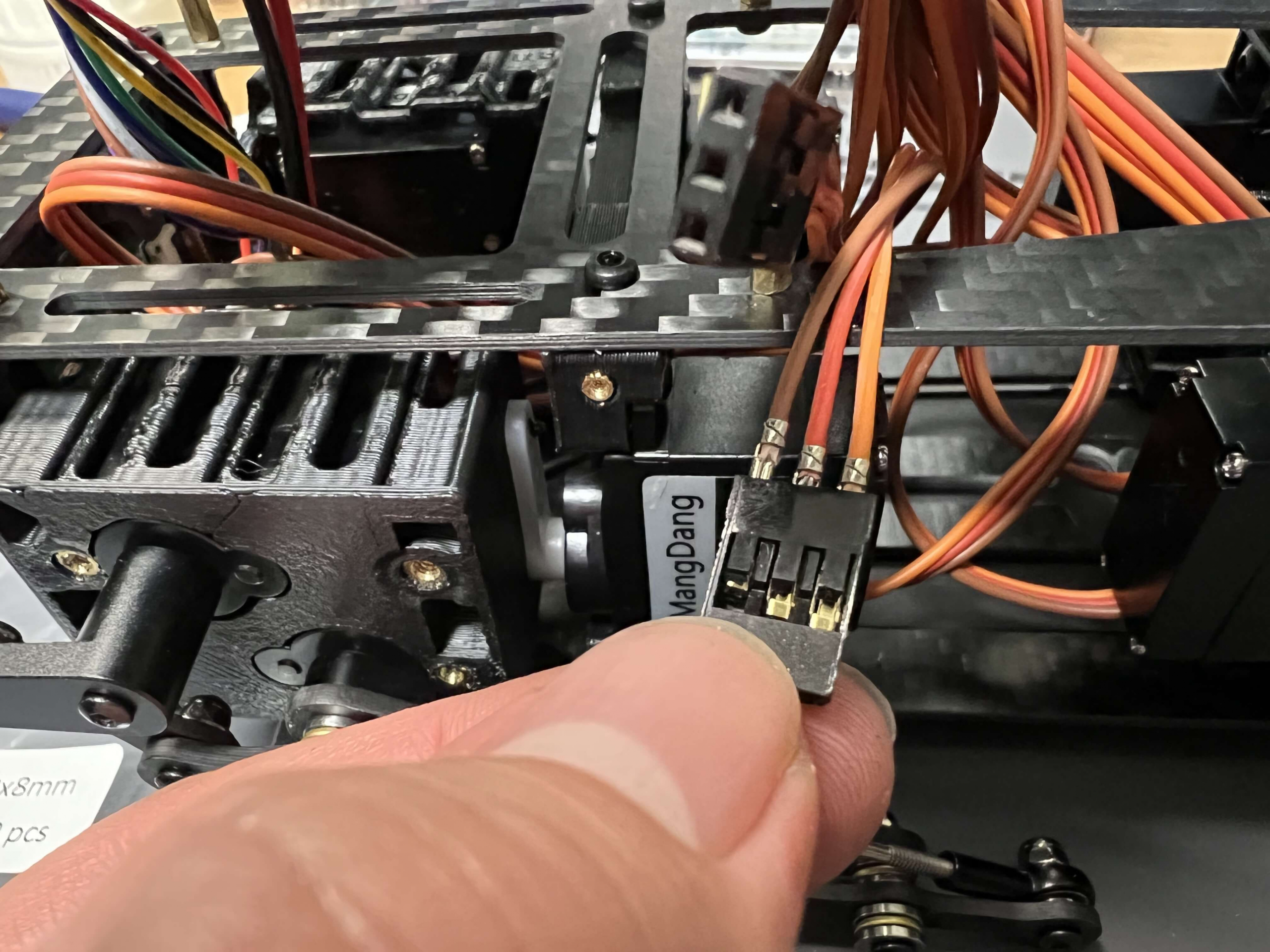
本体に脚部を取り付けていきます。取り付け時に各サーボモータのQIコネクタにマスキングテープと油性ペンを使って番号を振っておきます。
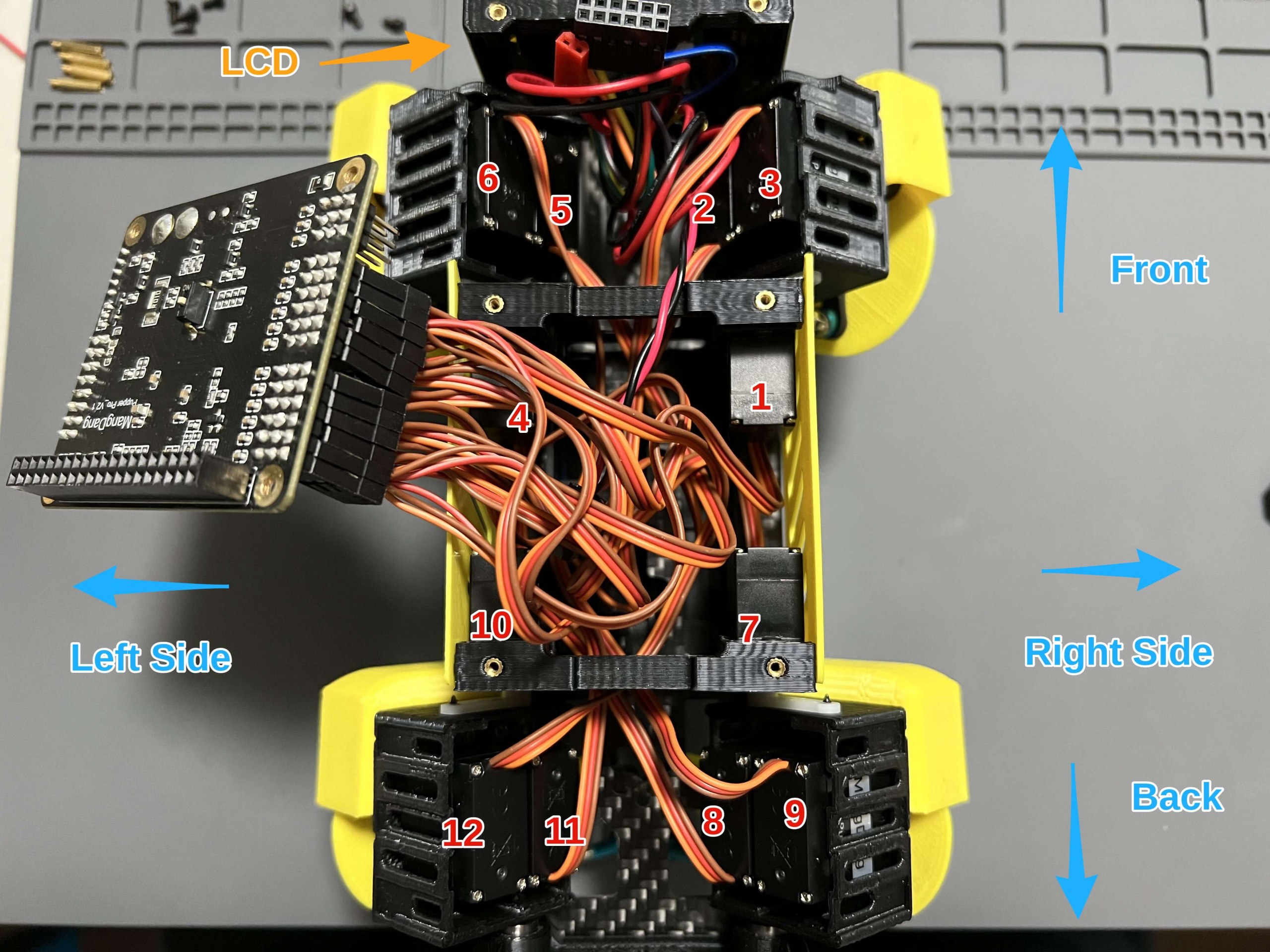
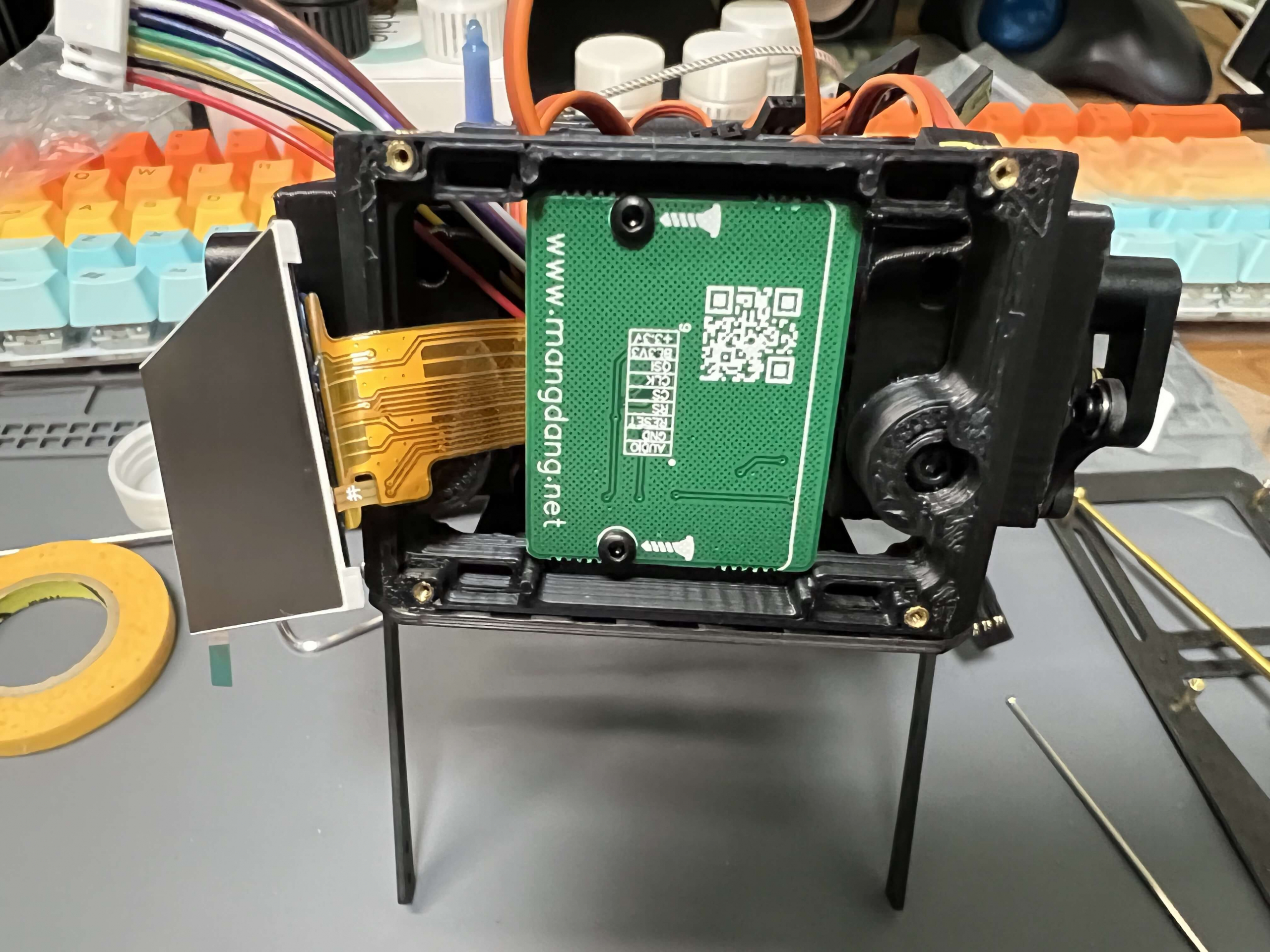
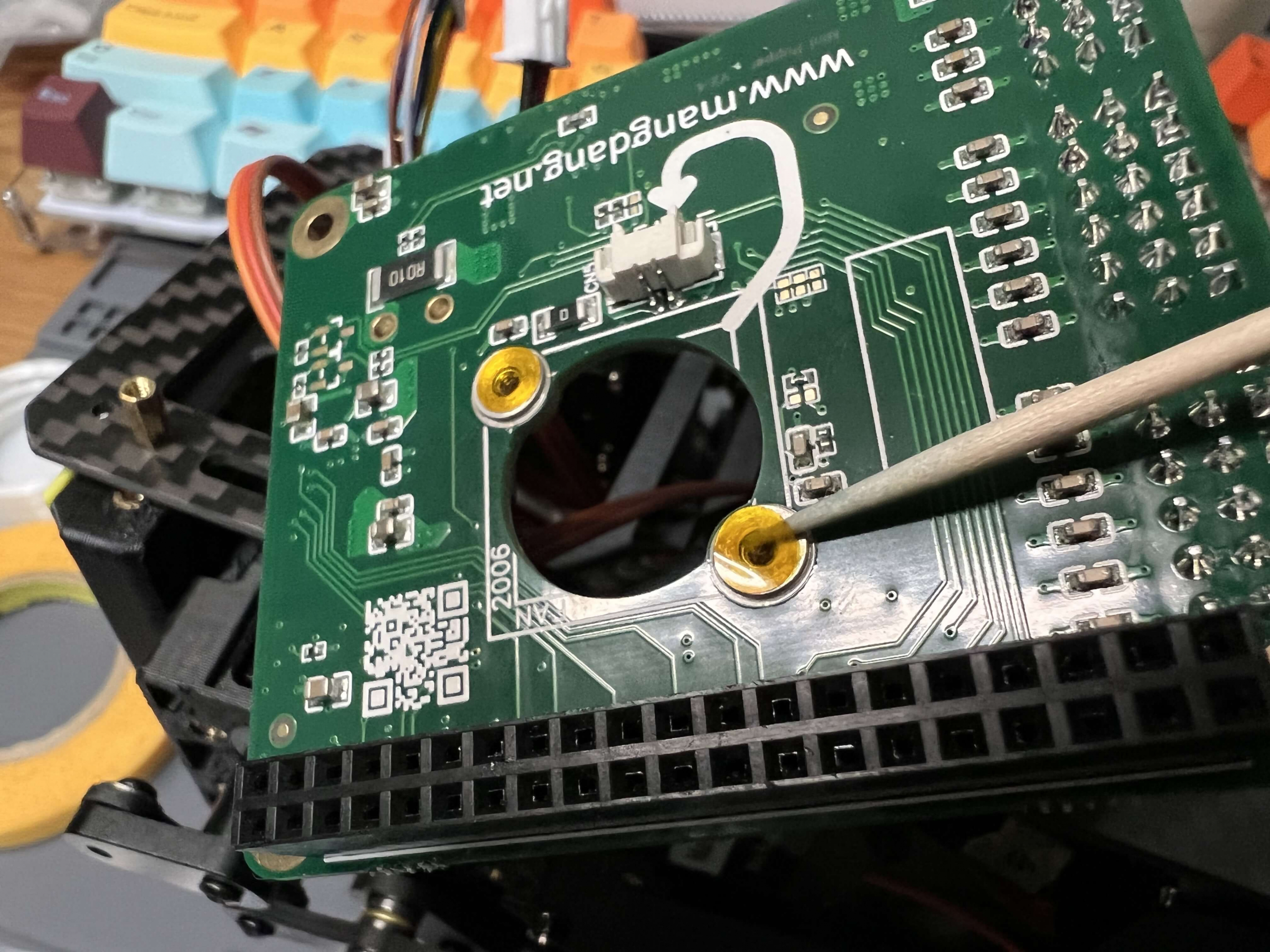
LCDパネルとその基板も取り付けます。


配線(と組み立て)
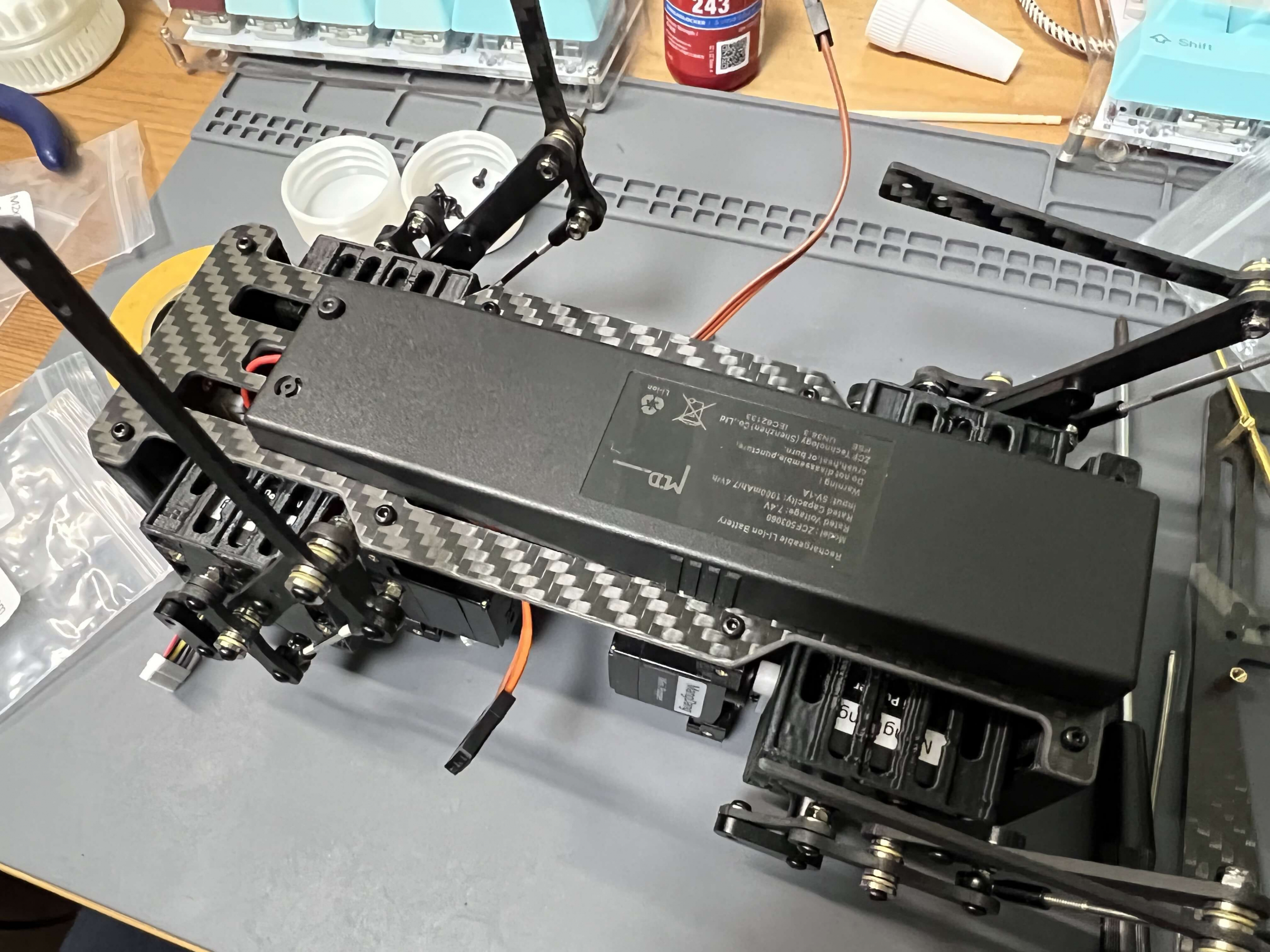
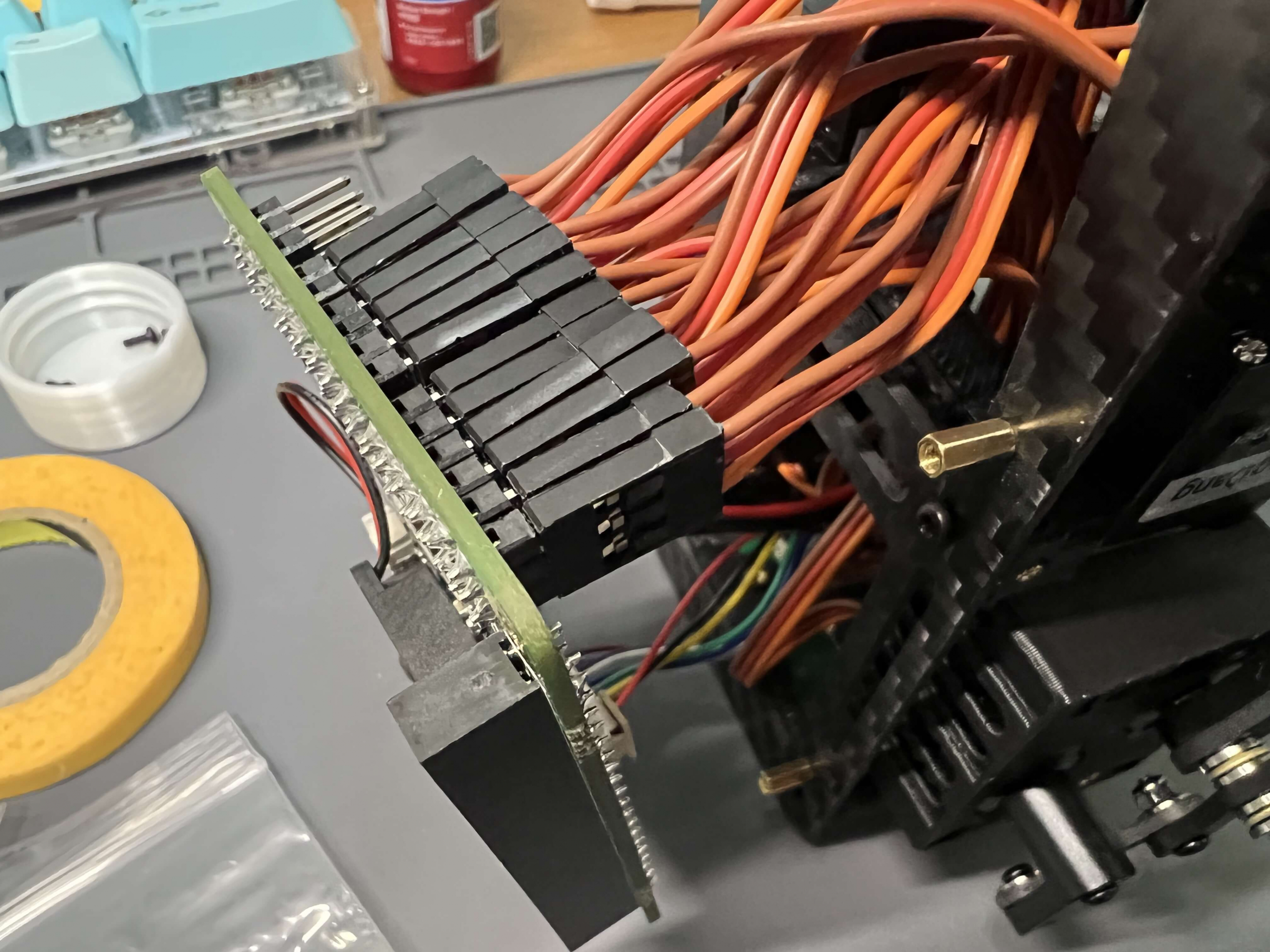
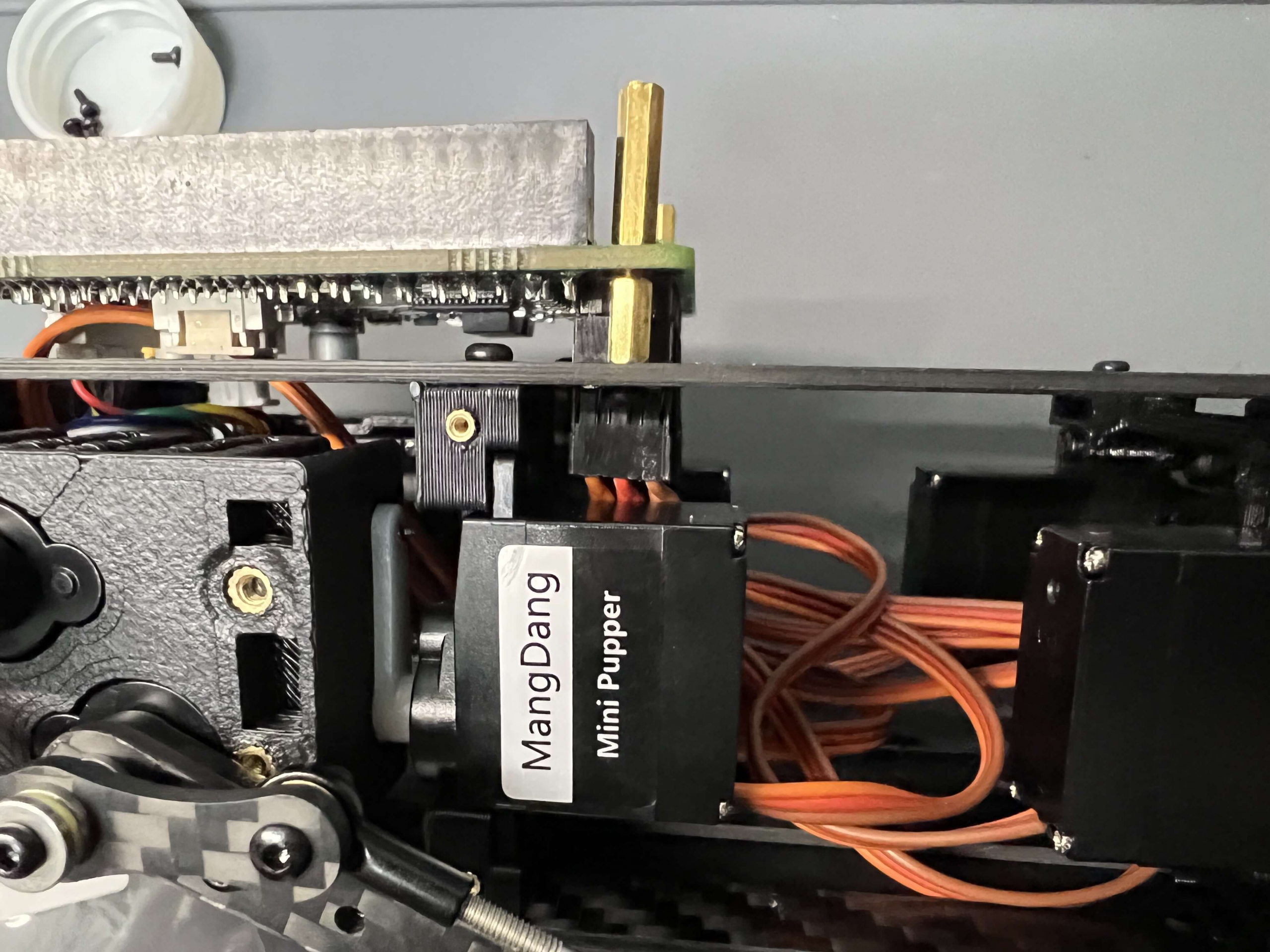
ファンをメイン基板に取り付けます。その後モータとLCD基板とバッテリからの配線も接続します。

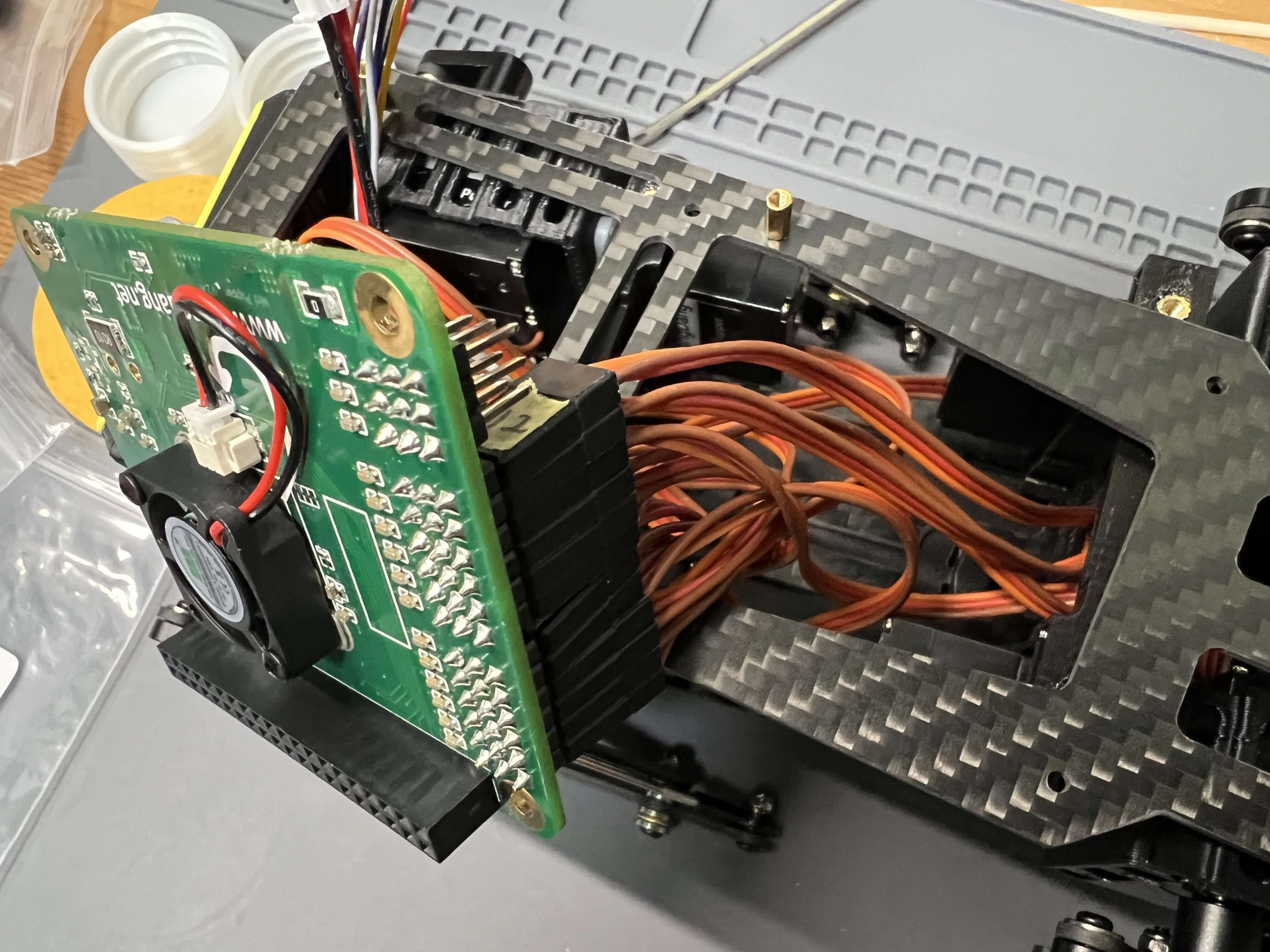

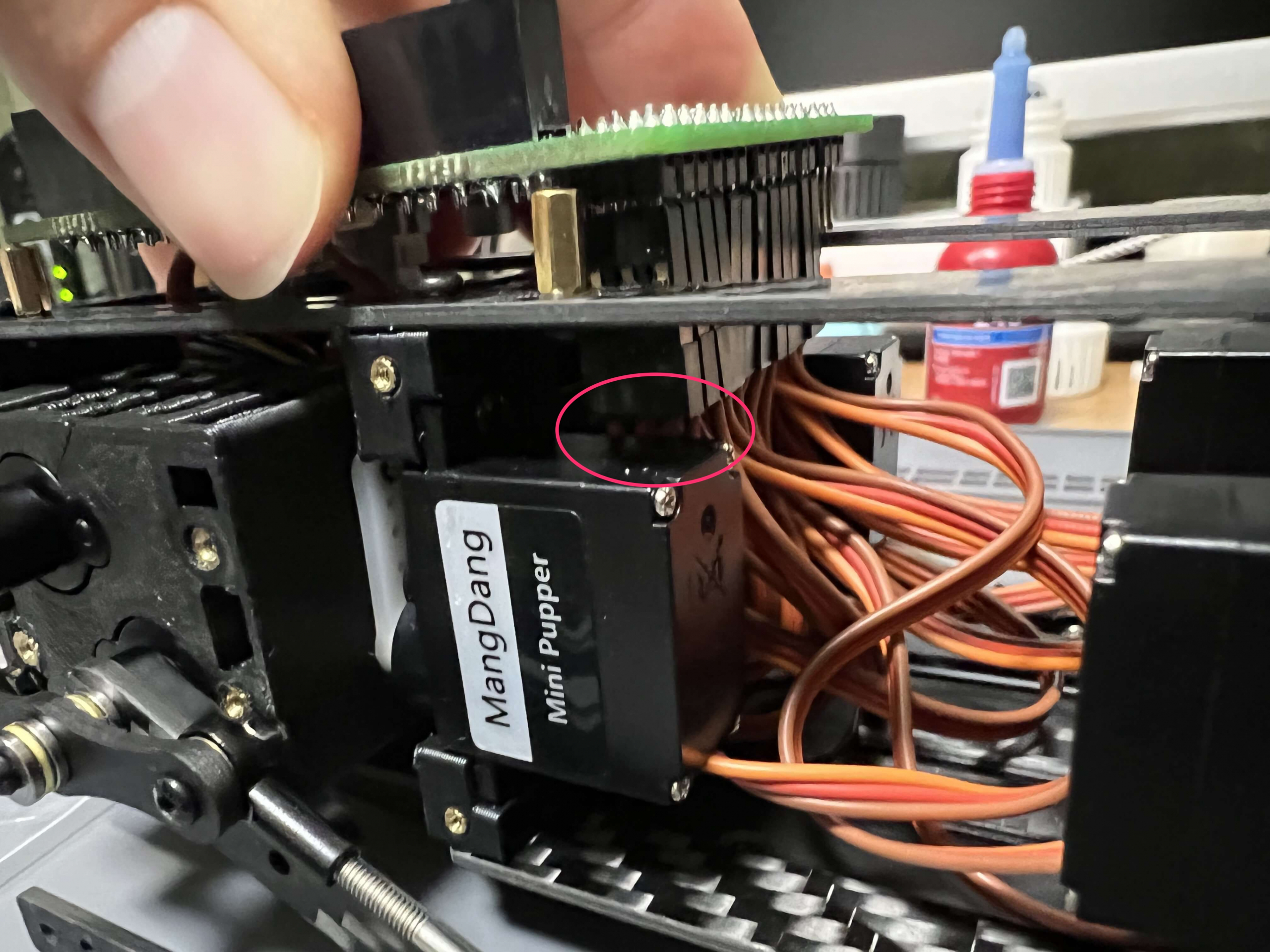
メイン基板を本体に取り付ける前に少しサーボモータのコネクタに手を入れました。サーボモータ4番にサーボモータ1番のコネクタが干渉するかしないかぎりぎりぐらいになってしまっています。これによって配線が圧迫されて断線してしまうことを防ぐためです。
(公式のマニュアルには強く押さないように書かれています)
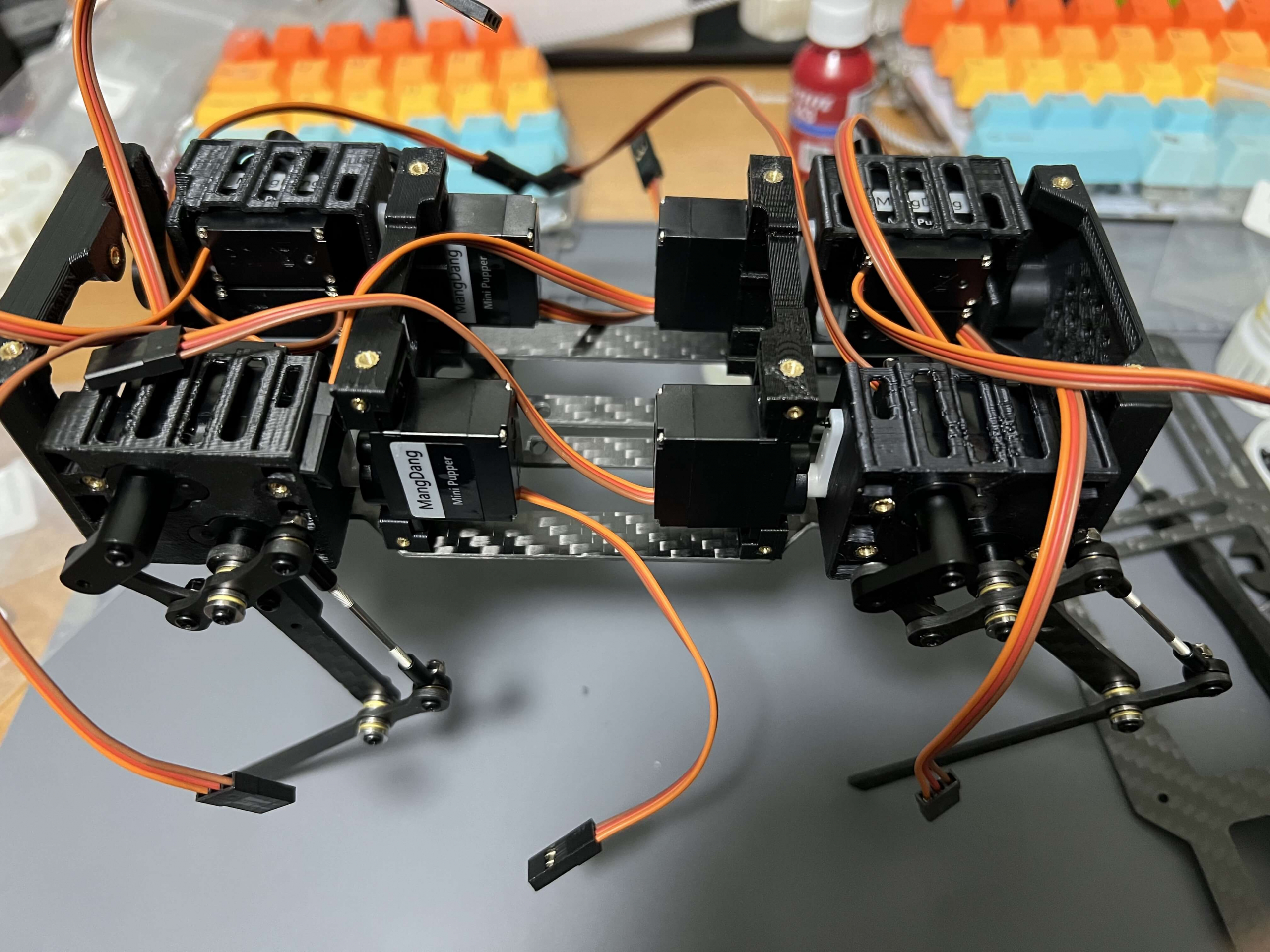
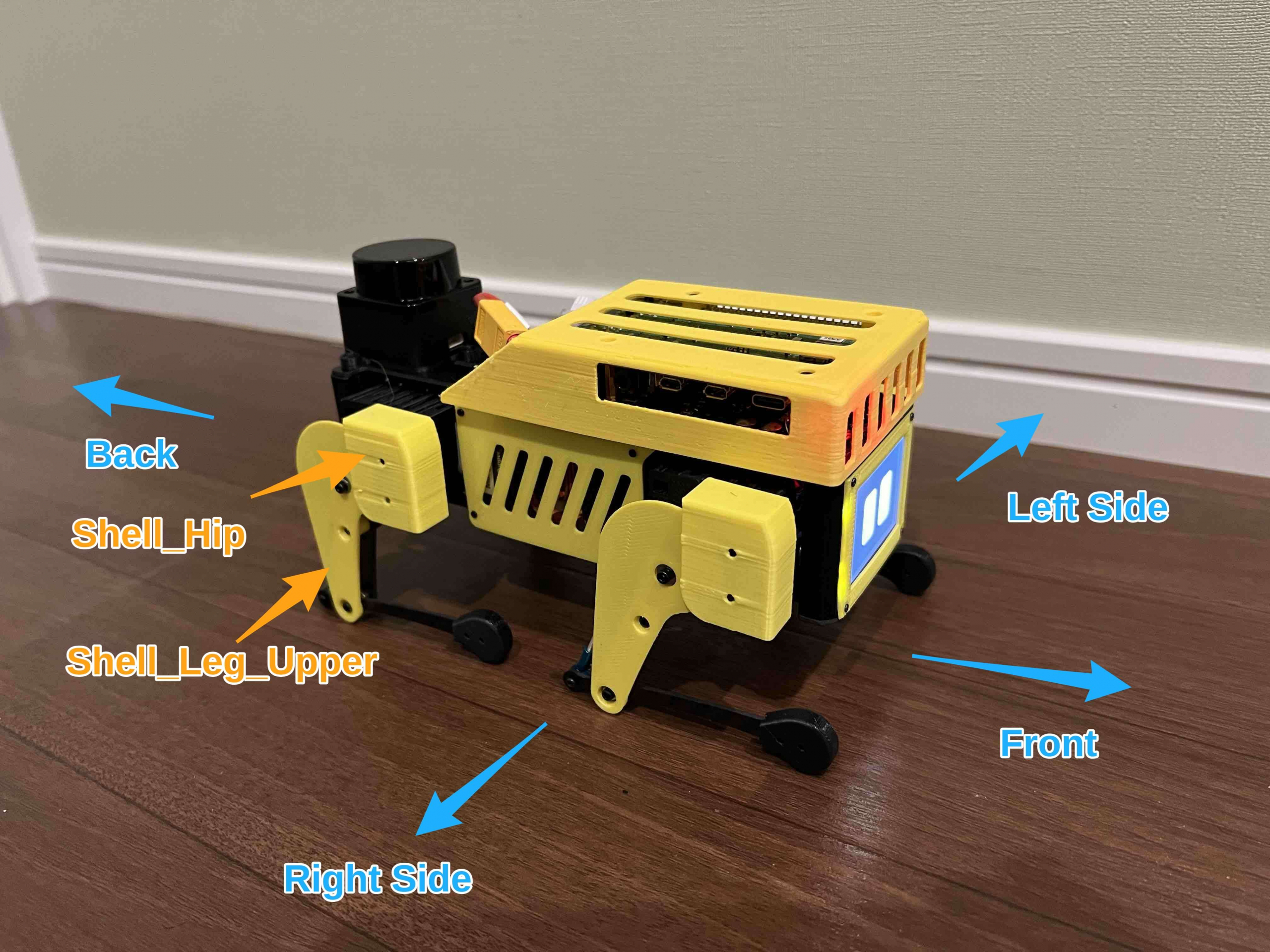
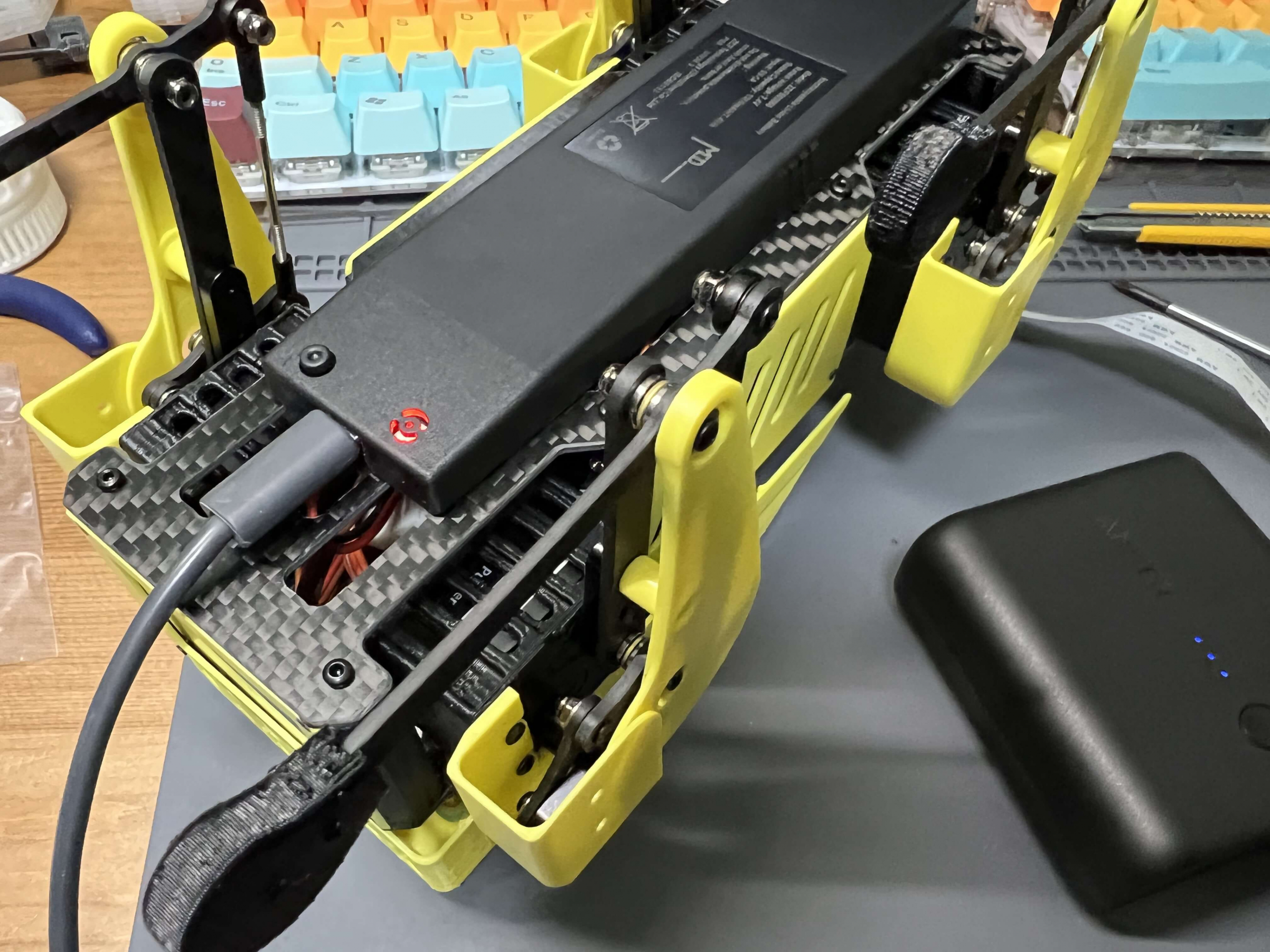
外装の取り付け
外装を取り付けたら完成です

ちなみに余ったネジはこちらです。
先行レビュー用の機体との違い
先行レビュー用の機体はそもそも部品が足りなくて自分で調達したものもあるので比較ができない部分もありますが、大きく変わった点がいくつかありました。
- メイン基板
- ファンが取り付けられるようになっていました
- 電源スイッチがなくなっていました
- 外装の一部
- FDMの3Dプリント部品から射出成形(?)の部品に変わった部分がありました
- 足先がPLAからTPUに変わっており少し滑りにくくなっていました(歩き方への影響は未確認です)


まとめと次回
KickstarterでbackしたMini Pupperが届いたので組み立ててみました。
バッテリー残量が少なかったためか、Raspberry Piを起動して動作確認するところまではできませんでした。次回はRaspberry Piをセットアップして歩かせてみたいと思います。



コメント