ROS 2– tag –
-

Mini Pupper 2をROS 2 Humbleで動かすまで
ROSCon2022でMini Pupperの発表をしたご縁があり、本日(2025年2月3日)Makuakeでキャンペーンが始まったMini Pupper 2を一足先に入手しました。ROS 2 Humbleで動かすまでの流れを中心にROS 2開発者目線でまとめました。 https://www.makuake.com/project/... -
TurtleBot3 + Gazebo + Navigation2 (ROS 2 Jazzy)
ROS 2 JazzyでGazebo(旧Ignition)上のTurtleBot3をNavigation2(Nav2)を動かすまで+その過程で調べたことのメモです。 背景 ROS 2 HumbleまではROBOTIS公式のe-manualを参照すればよかったのですが、現状はJazzyのサポートがないためその他のリソース... -
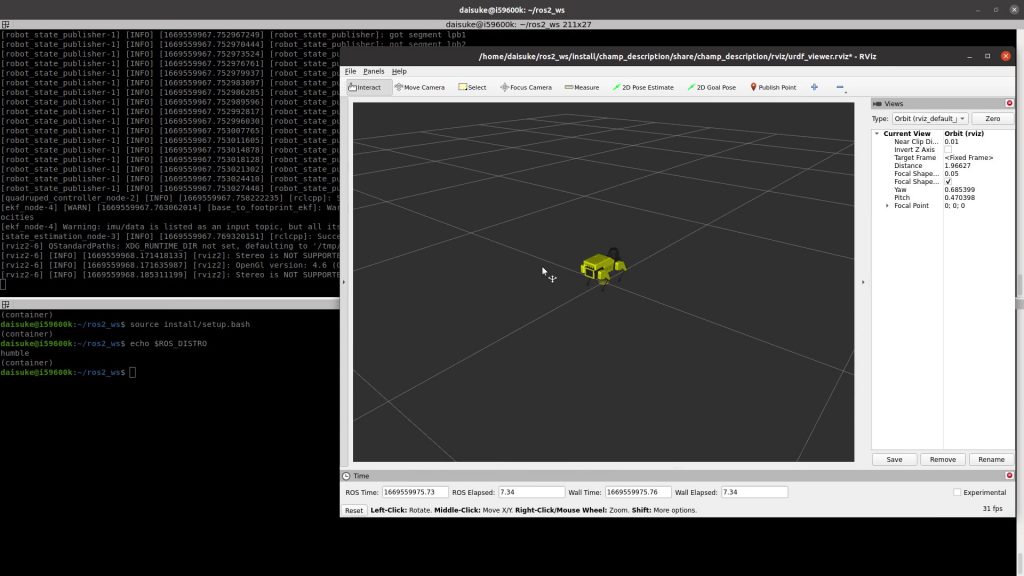
Ubuntu 20.04と最新Intel CPUでRVizを動かすDocker設定
最近ROSの開発に使用するPCを新しくしました。そこでRViz/RViz2などのOpenGLを使うソフトウェア周りでトラブルがあったので、その内容と対処方法を紹介します。 この記事はROS 2 Advent Calendar 2024の12/20の記事として投稿しています。 要約 今回から新... -
CHAMPをROS 2 Humbleへアップグレードした際にやったこと
4脚ロボット制御用のROSパッケージであるCHAMPを、ROS 2 Humbleに対応させるためにPull Requestを作成しました。その際に遭遇した内容については、その他のROS 2パッケージにおいてもROS 2 GalacticからROS 2 Humbleに移行する際に影響する可能性がありそ... -
ROS/ROS2のGUIをWebブラウザ経由でお手軽に試せるDockerfileを公開しました
ROS/ROS 2のGUIをWebブラウザ経由でお手軽に試せるDockerfileとDockerイメージを公開しています。その特徴と使用方法を紹介します。 今回紹介するのは Ubuntu Desktop(LXDE)VNCサーバWebブラウザから使用するVNCクライアント+WEBサーバROS/ROS 2 がイン... -
ROSパッケージ管理に使うバージョン管理ツールの違いとその使い方
ROS/ROS2のパッケージ管理のためにバージョン管理について調べていると、vcstools, wstool, rosinstall, vcstoolなど様々なバージョン管理ツールやバージョン管理のためのライブラリが出てきます。それぞれの違いや使い分けが気になって調べたので、その違... -
turtlesimを全方向移動に対応させるPRをマージしてもらった話
ROSのチュートリアルでよく使われるシミュレータにturtlesimがあります。このturtlesimをholonomic motion、つまり、オムニホイールやメカナムホイールを搭載したロボットのように全方向移動できるようにするためのPull Request(PR)を出して、無事にマー... -
github.com/ros2/ros2/wikiのリダイレクト先を探すためのウェブページを作成しました
ttps://github.com/ros2/ros2/wikiにて公開されていたドキュメントのリダイレクト先を探すためのウェブページを作成しました。公開先はこちらです。 https://tiryoh.github.io/ros2wiki_to_indexrosorg/ 使い方 https://tiryoh.github.io/ros2wiki_to_inde... -
[2019年4月版] ROS2の環境構築方法
[2020年2月18日追記] 2020年1月版を公開しています。 https://memoteki.net/archives/2569 先日開催されたROS Japan UG #29のROS2講習会に参加してきました。 ネット上に出ているROS2の環境構築方法は意外と古い話が多かったので、2019年4月22日時点でのRO... -
[2020年1月版] ROS2の環境構築方法
この記事は2019年4月に書いた「[2019年4月版] ROS2の環境構築方法」の改訂版です。 https://memoteki.net/archives/2150 以下の3つを紹介します。 オフィシャルなインストール方法セットアップスクリプトを使うインストール方法Dockerを使う方法 オフィシ... -
ROS2でコンピュータ同士が通信できない場合の対処方法
ROS2ではノード間の通信にDDS(Data Distribution Service)を使用しています((DDSについては@youtalkさんの記事が詳しいです。DDS (Data Distribution Service) とは | ros.youtalk.jphttps://ros.youtalk.jp/2017/05/28/dds.html))。コンピュータ同士(...




1