LIO-SAMが面白いらしいので調べてみました。
LIO-SAMの概要
LIO-SAMとは、LiDARと慣性オドメトリを用いて移動ロボットの軌跡推定と地図作成をリアルタイムで実現するフレームワークと[1][2007.00258] LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
https://arxiv.org/abs/2007.00258と説明されています。
(元の論文では “We propose a framework for tightly-coupled lidar
inertial odometry via smoothing and mapping, LIO-SAM, that
achieves highly accurate, real-time mobile robot trajectory estimation and map-building” と書かれています。)
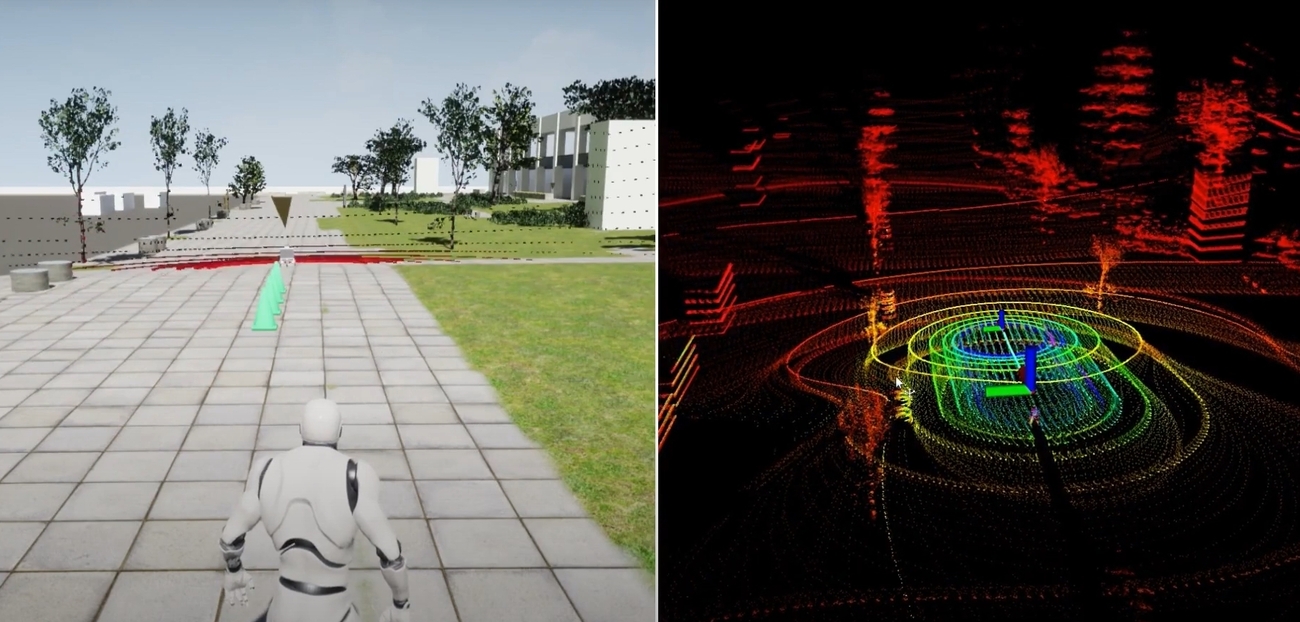
3次元LiDARとIMUを使い、スキャンマッチングをするSLAM手法(ループクロージャあり)であると思われます。
慣性計測が “tightly-coupled” なSLAMとは、オドメトリを計算する処理内でIMUの観測情報を用いている(LiDARの観測情報からのオドメトリの計算とIMUの観測情報からのオドメトリの計算結果をEKF等で合わせるのではなく、状態変数として用いる)手法のことを指す[2]第126回 RSJロボット工学セミナー「 Visual SLAMと深層学習を用いた3Dモデリング」(2020/5/22)
https://www.slideshare.net/KenSakurada/126-rsj2020522#79ようです。
LiDAR Inertial SLAMと呼ぶこともある[3]ROS2でLiDAR Inertial SLAM – Qiita
https://qiita.com/saitosasaki/items/45fbe94440cc3d0b94c1#lidar-inertial-slamとはようです。
以下のページでは「LeGO-LOAMにgtsamによるIMU補正手法等を取り入れたもの。」として紹介されています。

LIO-SAMのコードはBSD 3-Clause LicenseでGitHubに公開されています(後述)。
arXivに公開されている論文
論文の1stオーサーが公開している情報
GitHubリポジトリ

ライセンスはBSD 3-Clause Licenseのようです[4]LIO-SAM/LICENSE at master · TixiaoShan/LIO-SAM
https://github.com/TixiaoShan/LIO-SAM/blob/master/LICENSE。
YouTubeに公開されている動画
動画内で出てくるLIOMはLIO-mappingのことを指すようです。
LOAMはおそらく以下のものを指していると思われます。
( http://wiki.ros.org/loam_velodyne のオリジナルのソースは現在GitHub上では公開されていないようで、以下はOSSライセンスに基づいてコピーされたもののようです。)
興味を持っている人のツイート・ブログ
順不同です
LIO-SAM、LiDARをがんがんローリングさせても全然自己位置ロストしなくて凄い。
しかもこのデモ、動画自体は早送りしてなくて、rosbagを10倍速で再生してるらしい… https://t.co/z5JkZU30EV pic.twitter.com/QTxirA6tZw— アライグマ (@arai01robo) July 2, 2020

LIO-SAM関連ソフトウェア
| ↑1 | [2007.00258] LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping https://arxiv.org/abs/2007.00258 |
|---|---|
| ↑2 | 第126回 RSJロボット工学セミナー「 Visual SLAMと深層学習を用いた3Dモデリング」(2020/5/22) https://www.slideshare.net/KenSakurada/126-rsj2020522#79 |
| ↑3 | ROS2でLiDAR Inertial SLAM – Qiita https://qiita.com/saitosasaki/items/45fbe94440cc3d0b94c1#lidar-inertial-slamとは |
| ↑4 | LIO-SAM/LICENSE at master · TixiaoShan/LIO-SAM https://github.com/TixiaoShan/LIO-SAM/blob/master/LICENSE |
コメント