DCモータドライバ[TA7291P]を扱う方法を軽くまとめておきます。
TA7291Pでできること
トランジスタやFETを別に用意しなくても、このモータドライバさえ入手すれば、
マイコンからDCモータの正転・逆転を簡単に切り替えられるようになります。
2013年1月現在、秋月電子で2個入り300円で、お手頃です。
データシートはこちらです。
http://akizukidenshi.com/download/ta7291p.pdf
TA7291Pのピン配置
切欠きのある方を左側にしたとき(TOSHIBA TA7291Pが印字されてる面を見たとき)、ピンは左側から順番に1,2,3,…,8,9,10となっています。
それぞれのピンには、次の表の通り役割が割り当てられています。
| ピン | 詳細 | 使い方 |
| 1 | GND | GNDと接続 |
| 2 | OUT1 | モータに接続 |
| 3 | – | 不使用 |
| 4 | Vref | 速度調整用 |
| 5 | IN1 | mbedのデジタル出力に接続 |
| 6 | IN2 | mbedのデジタル出力に接続 |
| 7 | Vcc | mbedのVOUT(5V)に接続(IC駆動用) |
| 8 | Vs | モータの電源用 |
| 9 | – | 不使用 |
| 10 | OUT2 | モータに接続 |
実際の接続方法
実際の接続方法について軽く説明します。
モータの速度調整はしないので4番ピンとVccの間に10k[Ω]の抵抗を挟んでつなげておきます。
10k[Ω]がなければ近い値ので抵抗で問題ありません。
マイコンボードはmbedで説明しています。
LEDを使った動作確認
まず、回路が問題なく動くことを確認するため、モータではなく、LEDで試してみます。
モータは大電流を必要としますが、LEDは省電力でほとんど電流を必要としません。
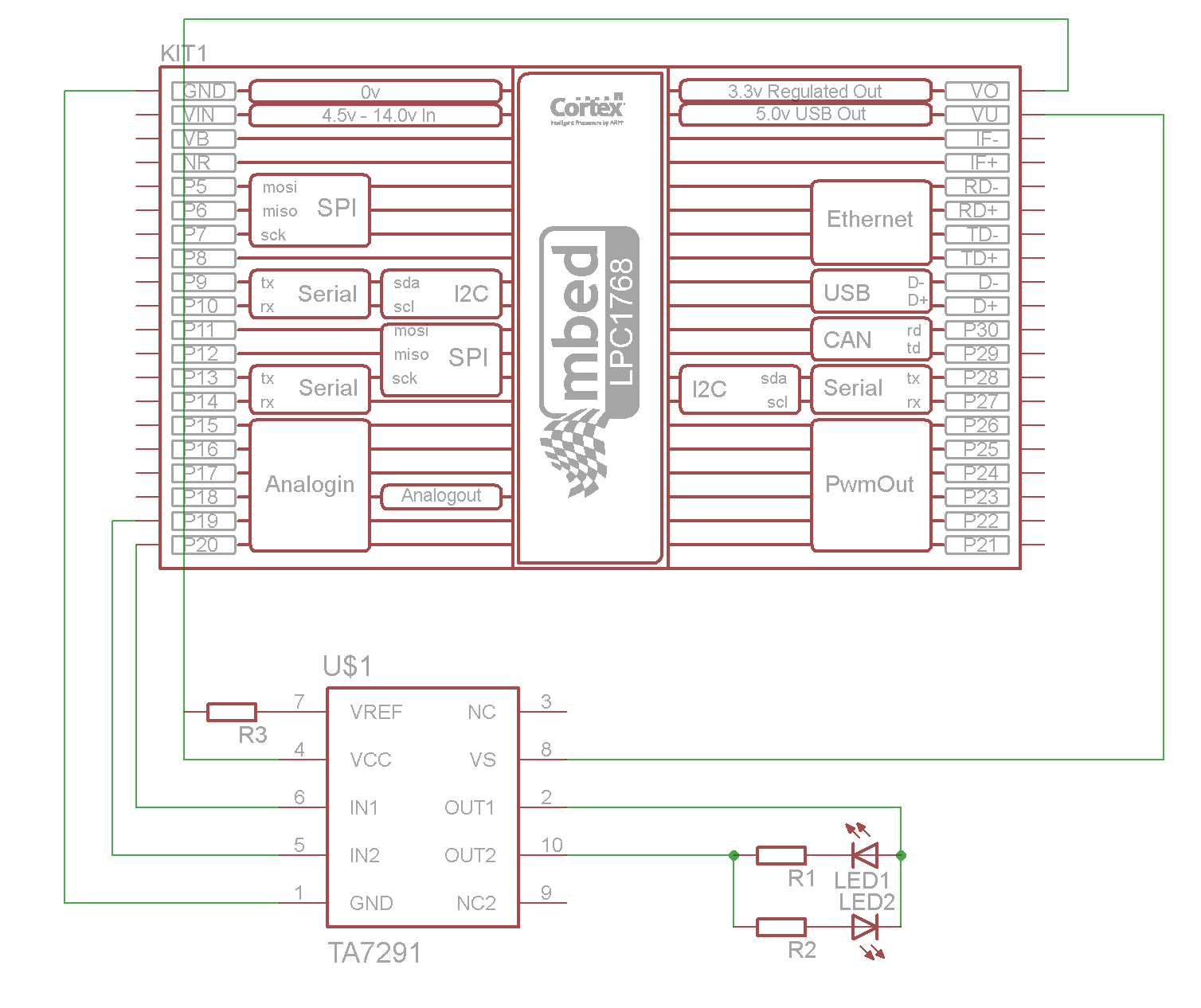
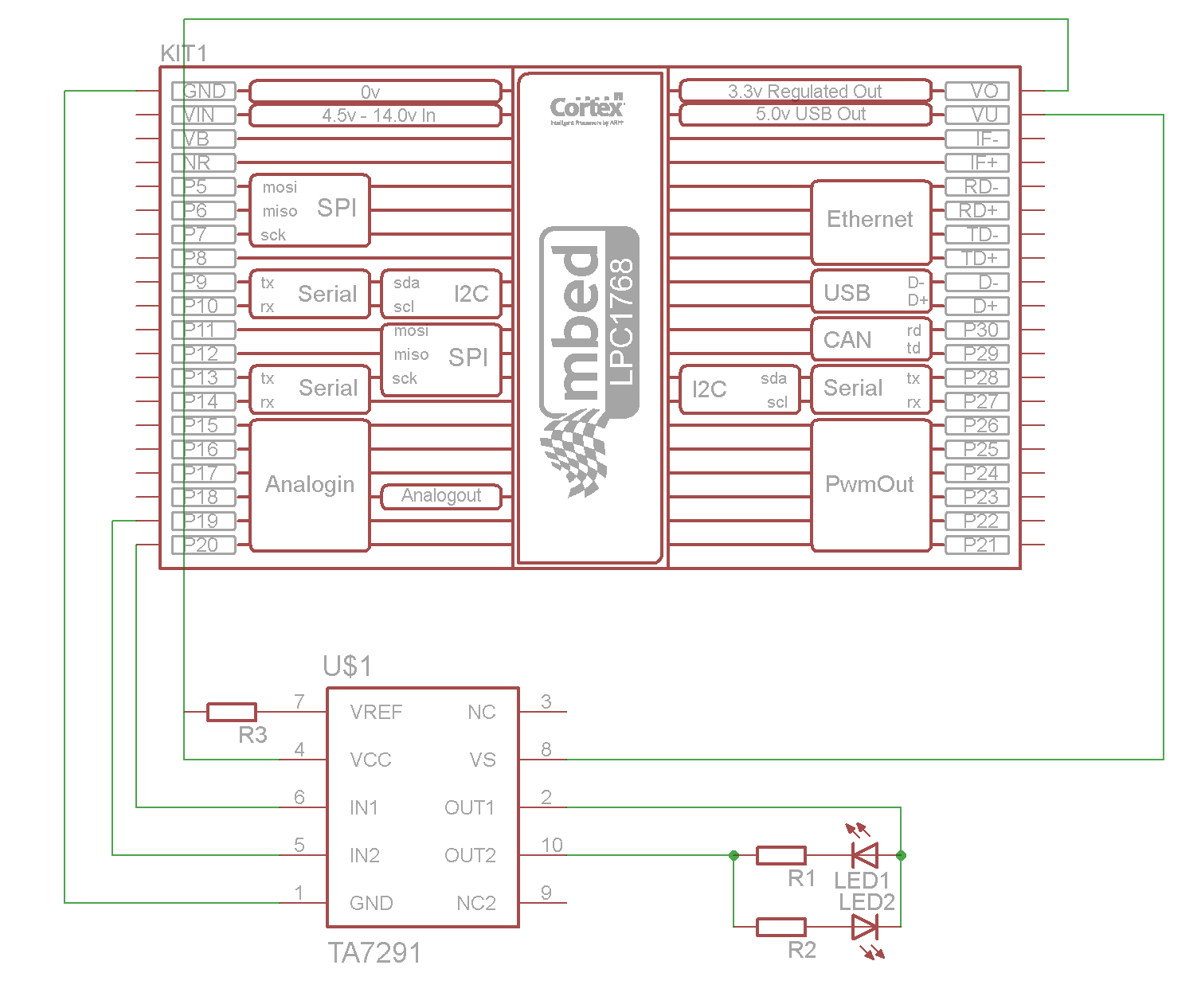
回路図は次の通りです。
mbed Compilerの「main.cpp」に次のように書きます。
#include "mbed.h"
DigitalOut pin1(p19),pin2(p20);
int main() {
while(1) {
pin1 = 1;
pin2 = 0;
wait(0.6);
pin1 = 0;
pin2 = 1;
wait(0.6);
}
}
19番ピンと20番ピンを使用しているので、「main.cpp」では
DigitalOut pin1(p19),pin2(p20);
と定義します。必要に応じて名前やピンの番号を変更します。
このコードをコンパイルし、ダウンロードできたバイナリファイルをマイコンボードに書き込みます。
LEDが0.6秒おきに交互に点滅することが確認できたでしょうか。
確認できなかった場合は、もう一度、配線を確認してみてください。
モータを使った動作確認
モータにする場合は、Vsにmbedの5Vではなく、電池などの外部電源を接続します。
その理由は先ほどLEDを使う理由として説明したとおり、モータはLEDと比べてはるかに大電流を必要とするからです。
mbedやArduinoのマイコンボードでは電流を供給しきれません。



コメント