Raspberry Pi 3上でUbuntu 18.04 + ROS Melodic Morenia(以下、ROS Melodic)の動作確認をしました。
いろいろと試しながらインストールしたりしたのでHow-toカテゴリではなく試行錯誤の記録カテゴリに投稿しています。
動作確認内容
Ubuntu 18.04 + ROS Melodicで
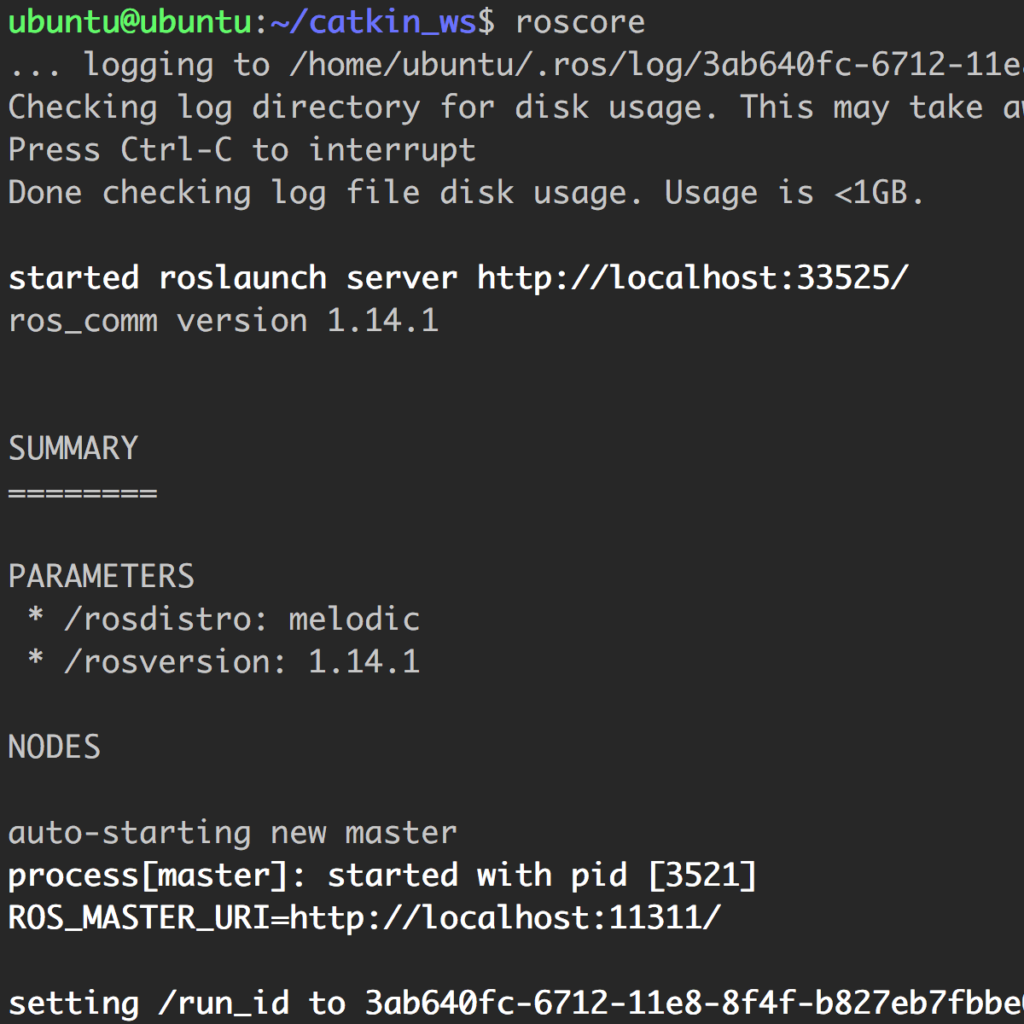
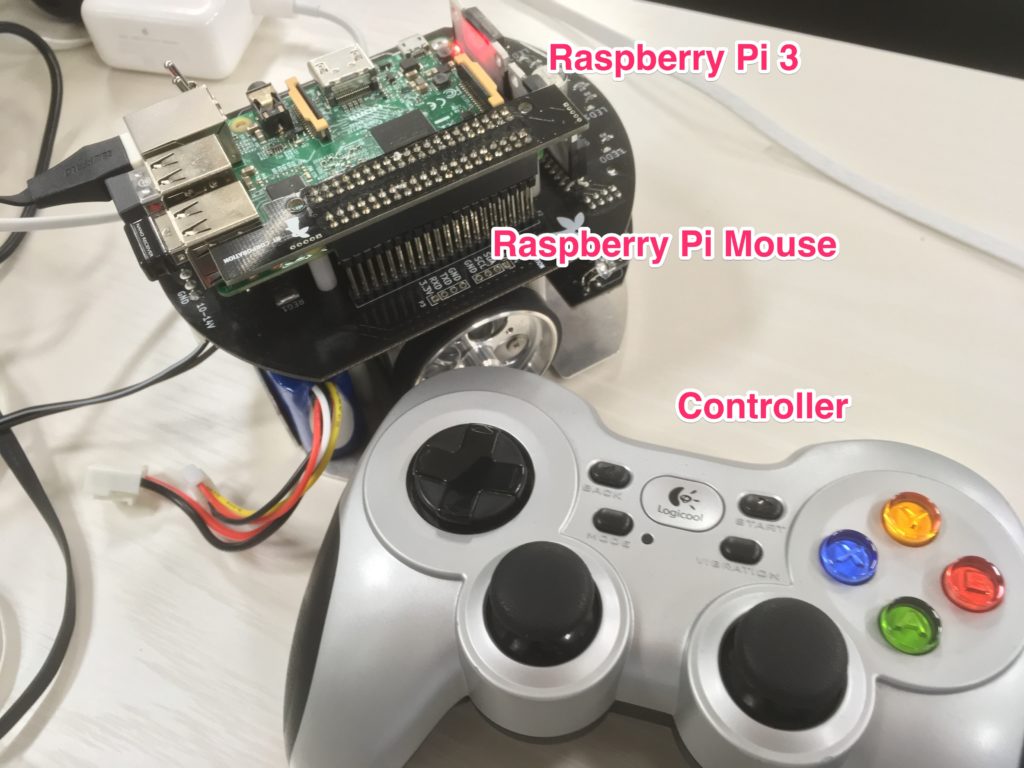
$ roscoreを実行できる- Raspberry Pi Mouseをraspimouse_game_controllerを使って操作できる
ことを確認しました。
- ROS Melodic
- http://wiki.ros.org/melodic
- Raspberry Pi Mouse
- https://www.rt-net.jp/products/raspimouse2/
- raspimouse_game_controller
- https://github.com/zaki0929/raspimouse_game_controller
やったこと
Ubuntu 18.04のインストール
ここにあるubuntu-18.04-preinstalled-server-armhf+raspi3.img.xzをmicroSDに書き込みました。
ARM/RaspberryPi – Ubuntu Wiki
https://wiki.ubuntu.com/ARM/RaspberryPi
起動後、cloud-initを削除します。”クラウドのインスタンスを最初に初期化するためのユーティリティからなるパッケージ”[1]Cloud-init – ArchWiki – Arch Linux
https://wiki.archlinux.jp/index.php/Cloud-initです。起動時に何らかの処理を行っているようで、ぱっと電源を入れて使いたいという今回のRaspberry Pi 3の用途では不要なので削除しました。
ROS Melodicのインストール
このインストールスクリプトを使用しました。
ROSパッケージのインストール
catkin_wsを作成し、以下のパッケージをダウンロードしました。
- raspimouse_ros_2
- https://github.com/ryuichiueda/raspimouse_ros_2
- raspimouse_game_controller
- https://github.com/zaki0929/raspimouse_game_controller
- joystick_drivers
- https://github.com/ros-drivers/joystick_drivers
joystikc_driversが必要なのはros-melodic-joyが2018年6月3日現在ではaptコマンドでインストールできなかったためです。
[2018年7月19日追記]
6月末にaptコマンドでもインストールできるようになりました。
詳細はGitHubの以下のissueで確認できます。
https://github.com/ros-drivers/joystick_drivers/issues/119
[追記ここまで]
依存パッケージもインストールする際には~/catkin_wsにて以下のコマンドを実行しました。
rosdep install -r -y --ignore-src --from-paths src
この状態でcatkin_makeしたところ、無事にRaspberry Pi Mouseを操作することができました。



コメント