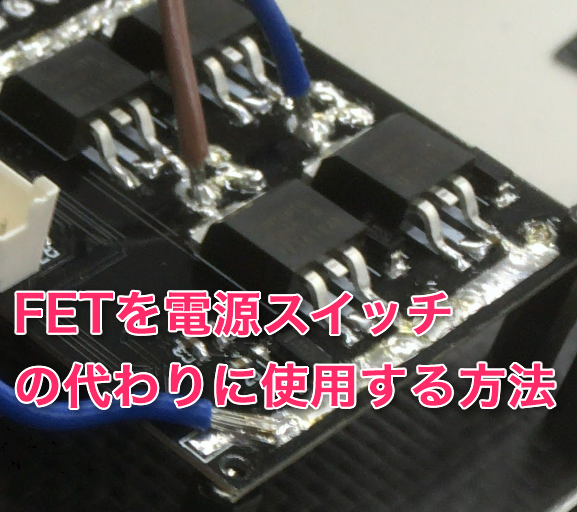
-

2021年のふり返りと買ってよかったもの紹介
この記事は以下の2点について記載しています。 今年はなぜブログをあまり書かなかったのかブログを書かなくなってからの変化2021年に買ってよかったもの 今年はなぜブログをあまり書かなかったのか 2021年はブログは全然書いてないのにブログについて色々... -
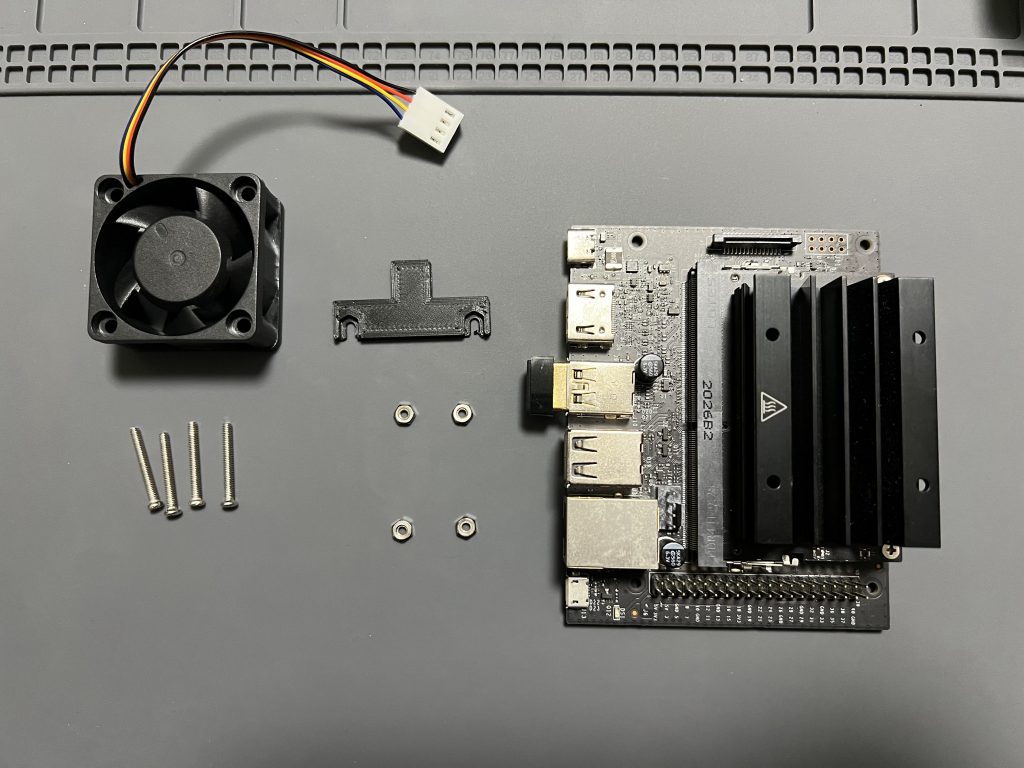
Jetson Nanoにファンを取り付けたらよかったという話
Jetson Nano Develper Kitにファンを取り付けたらよかったので共有します。ファン取り付けの際にナットを保持するのが大変だったので治具を作ってみました。 ファンを取り付ける効果 ファンを取り付けるとパッシブな空冷ではなく強制空冷になり、ヒートシ... -
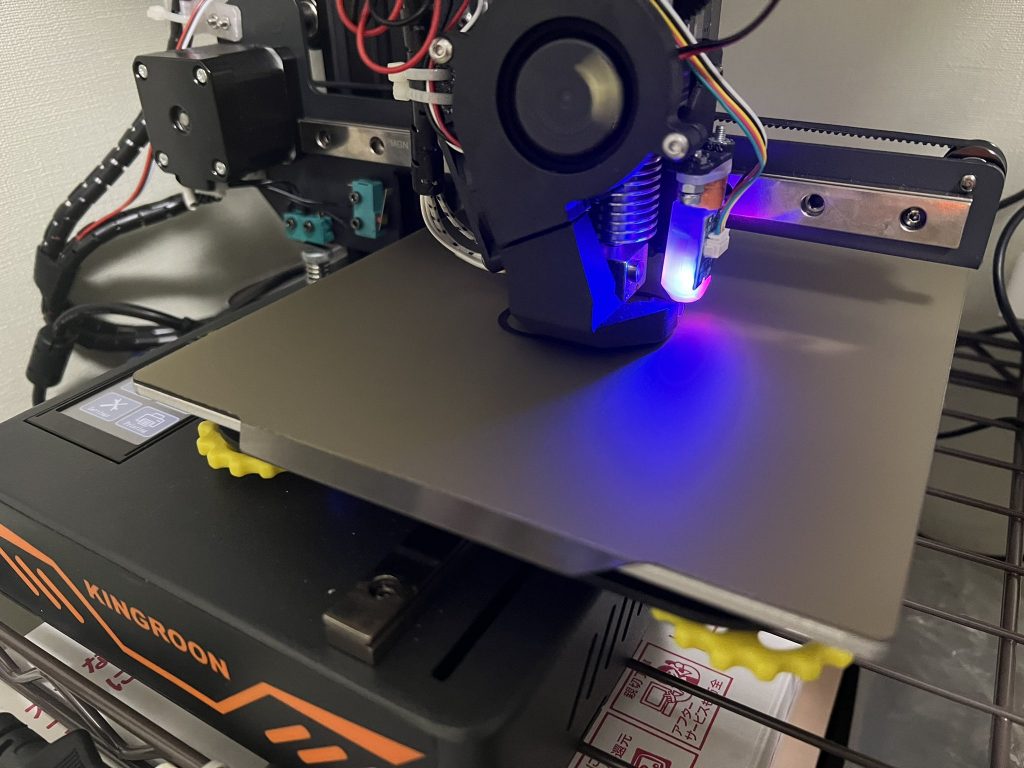
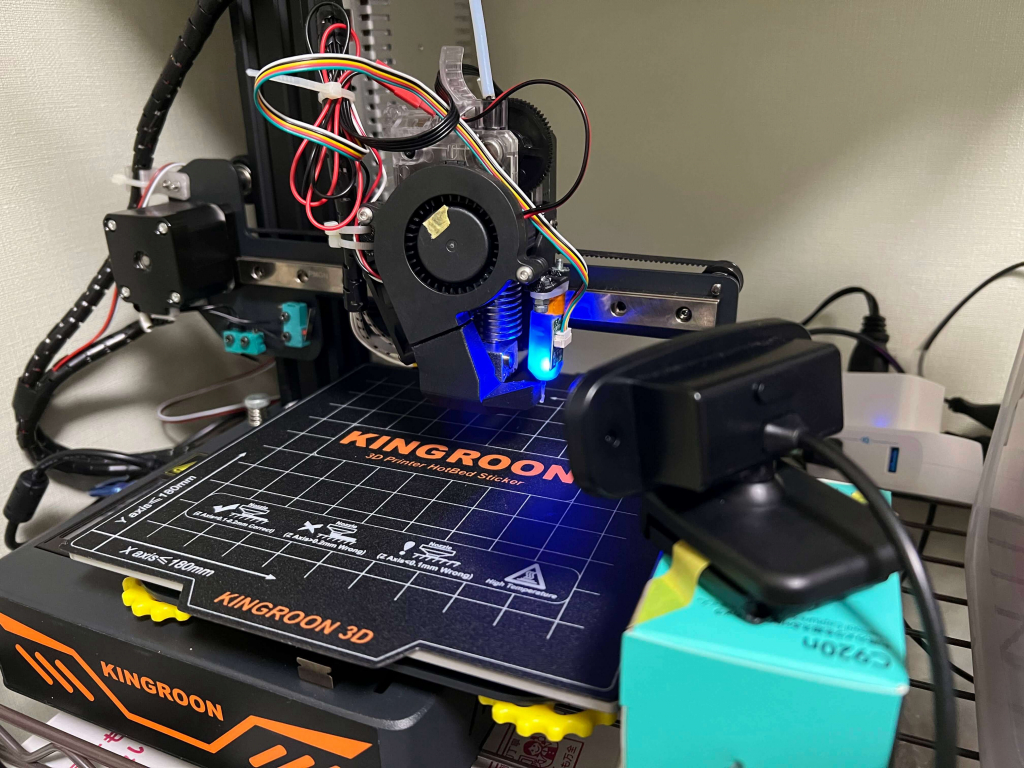
3DプリンタKINGROON KP3Sを購入しました
2021年9月末に新しい3Dプリンタを購入しました。KINGROONのKP3Sという機種です。 ファームウェア入れ替えたり色々改造しようと考えているため、3Dプリンタ自体の紹介もしておこうかなと思います。 経緯 3DプリンタとしてはAfinia H800+をすでに所持してお... -
ROSパッケージ管理に使うバージョン管理ツールの違いとその使い方
ROS/ROS2のパッケージ管理のためにバージョン管理について調べていると、vcstools, wstool, rosinstall, vcstoolなど様々なバージョン管理ツールやバージョン管理のためのライブラリが出てきます。それぞれの違いや使い分けが気になって調べたので、その違... -
メモリ2GB版Jetson NanoでDocker内のROSを使うまで
Jetson Nano 2GB Developer Kit(メモリ2GB版Jetson Nano)でROSインストール済みのDockerイメージを用意して、コンテナ内のROSを使うまでをメモします。 この記事はROS/ROS2 Advent Calendar 2020の16日目の記事です。 概要 Jetson Nano 2GB Developer Ki... -
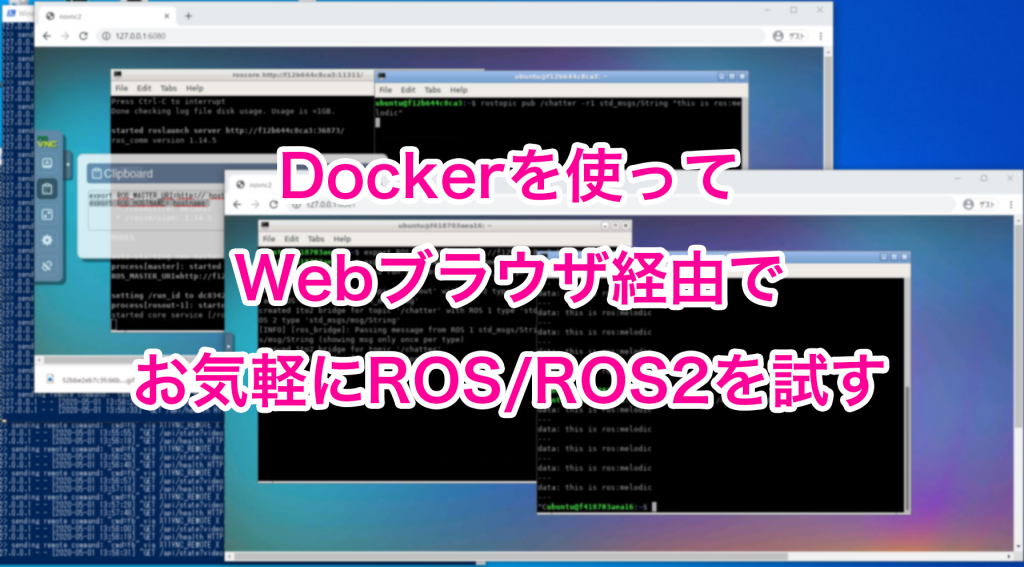
Amazon Lightsailでros-desktop-vncを起動する方法
2020年11月13日にAmazonが公開したブログでLightsail Containersの紹介がありました。 これを使ってtiryoh/ros-desktop-vncを起動してみたので紹介します。 https://aws.amazon.com/jp/blogs/aws/lightsail-containers-an-easy-way-to-run-your-containers... -
LIO-SAMが面白いらしいので調べてみた
LIO-SAMが面白いらしいので調べてみました。 LIO-SAMの概要 LIO-SAMとは、LiDARと慣性オドメトリを用いて移動ロボットの軌跡推定と地図作成をリアルタイムで実現するフレームワークと(([2007.00258] LIO-SAM: Tightly-coupled Lidar Inertial Odometry via... -
turtlesimを全方向移動に対応させるPRをマージしてもらった話
ROSのチュートリアルでよく使われるシミュレータにturtlesimがあります。このturtlesimをholonomic motion、つまり、オムニホイールやメカナムホイールを搭載したロボットのように全方向移動できるようにするためのPull Request(PR)を出して、無事にマー... -
PlatformIOでM5Stack ATOMに書き込むまで
Windows上のVisual Studio CodeでPlatformIOでM5Stack ATOM MatrixのLチカ用プロジェクトを作成し、プログラムを書き込んでみたのでその方法をメモしておきます。 PlatformIOはPython製のマイコン開発環境です。公式サイトでは A new generation ecosystem... -
github.com/ros2/ros2/wikiのリダイレクト先を探すためのウェブページを作成しました
ttps://github.com/ros2/ros2/wikiにて公開されていたドキュメントのリダイレクト先を探すためのウェブページを作成しました。公開先はこちらです。 https://tiryoh.github.io/ros2wiki_to_indexrosorg/ 使い方 https://tiryoh.github.io/ros2wiki_to_inde... -
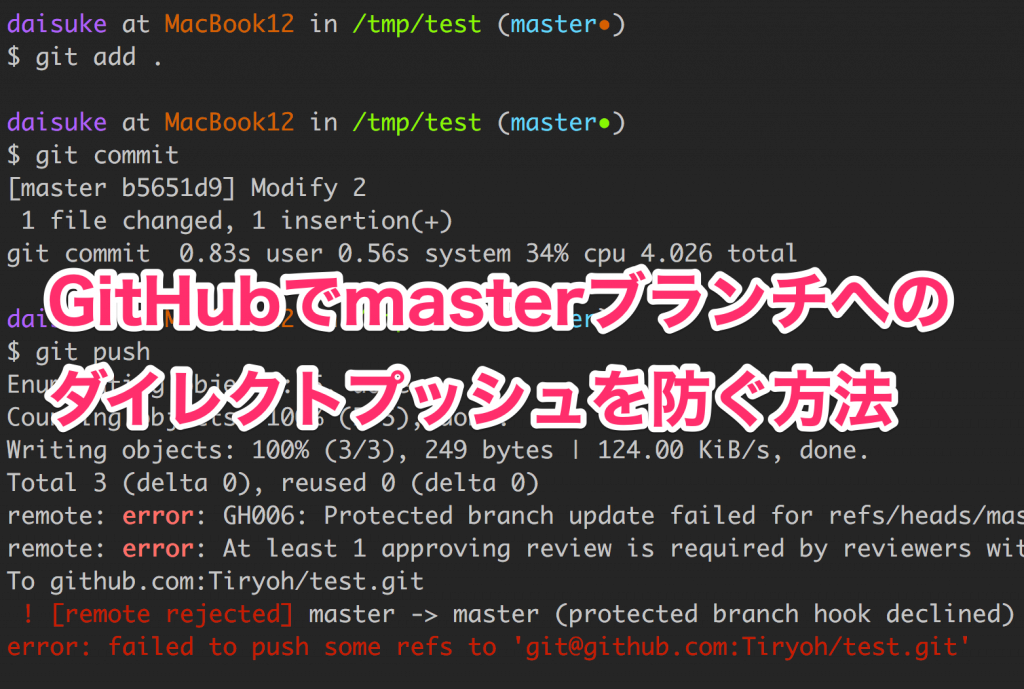
GitHubでmasterブランチへのダイレクトプッシュを防ぐ方法
git-flowやGitHub Flowで開発していると更新内容はmasterリポジトリにいきなりプッシュせず、別のブランチで作業してからmasterブランチに統合したいですが、操作ミスでmasterブランチにプッシュしてしまうこともあります。あらかじめmasterブランチへのダ... -
[2019年4月版] ROS2の環境構築方法
[2020年2月18日追記] 2020年1月版を公開しています。 https://memoteki.net/archives/2569 先日開催されたROS Japan UG #29のROS2講習会に参加してきました。 ネット上に出ているROS2の環境構築方法は意外と古い話が多かったので、2019年4月22日時点でのRO... -
rosdepをインストールする手順が変わったようです
依存関係を調べて必要に応じて追加パッケージをインストールしてくれるツールであるrosdepは、今後はpython-rosdepをaptで手動でインストールする必要があるようです。 ROS Wikiのインストール方法を紹介するページも更新され、「If you have not yet inst... -
さくらのVPSのキャンペーンでミニスーファミをもらった話
さくらインターネットでは「さくらのVPS」のリニューアルキャンペーンでプレゼント企画をやっていました。そして、その企画でめでたく当選し、先日その賞品が届きました。届いた商品は「ニンテンドークラシックミニ スーパーファミコン」です。 https://ww... -
[2020年1月版] ROS2の環境構築方法
この記事は2019年4月に書いた「[2019年4月版] ROS2の環境構築方法」の改訂版です。 https://memoteki.net/archives/2150 以下の3つを紹介します。 オフィシャルなインストール方法セットアップスクリプトを使うインストール方法Dockerを使う方法 オフィシ...
メモ的な何か。学んだことをマイペースにメモしていきます。